todas las categorias
-
Circuitos integrados (ICS)
Circuitos integrados (ICS)
- Interfaz - Sensor, táctil capacitiva(642)
- ICS especializado(12302)
- PMIC-Reguladores del voltaje-propósito especial(5644)
- PMIC - Reguladores de voltaje - Controladores de reguladores lineales(793)
- PMIC-Reguladores de voltaje-lineal + conmutación(1829)
- PMIC-Reguladores de voltaje-lineal(70981)
- PMIC - Reguladores de voltaje - Reguladores de conmutación de CC DC(39569)
- PMIC - Reguladores de voltaje - Controladores de conmutación de CC DC(13507)
- Referencia del PMIC(9453)
- PMIC-v/f y f/v convertidores(145)
- PMIC-gestión térmica(592)
- PMIC-supervisores(47946)
- PMIC-RMS a los convertidores de la c.c.(170)
- PMIC-controladores de alimentación, monitores(2104)
- PMIC-Power over Ethernet (PoE) controladores(1008)
- PMIC-gestión de la energía-especializado(7722)
- PMIC: interruptores de distribución de energía, controladores de carga(7706)
- PMIC-PFC (corrección de factor de potencia)(1222)
- PMIC-o reguladores, diodos ideales(705)
- PMIC-controladores de motor, Controladores(4712)
- PMIC-Lighting, reguladores del lastre(560)
- PMIC-controladores LED(7282)
- PMIC-controladores láser(573)
- PMIC-Reguladores calientes del intercambio(2816)
- Conductores de la PMIC-puerta(7083)
- PMIC-Full, medio puente conductores(1342)
- PMIC-medición de energía(654)
- PMIC-controladores de pantalla(1435)
- PMIC-regulación/gerencia actuales(1481)
- PMIC-gestión de baterías(5553)
- PMIC-cargadores de batería(3831)
- PMIC - convertidores CA DC, conmutadores fuera de línea(4905)
- Controladores de memoria(358)
- Proms de configuración de memoria para FPGAs(639)
- Memoria-baterías(13)
- Memoria(65694)
- Lógica-universal bus funciones(706)
- Lógica-traductores, cambiadores de nivel(2854)
- Lógica-especialidad lógica(1870)
- Lógica: interruptores de señal, multiplexores, decodificadores(9420)
- Registros de cambios lógicos(2665)
- Lógica-generadores de paridad y damas(335)
- Lógica-multivibradores(831)
- Lógica-pestillos(3658)
- Lógica - puertas e inversores - multifunción, configurable(1687)
- Logic-Gates e inversores(16453)
- Lógica-flip flops(7780)
- Lógica-memoria FIFOs(4240)
- Contadores lógicos, divisores(3456)
- Lógica-comparadores(592)
- Lógica: buffers, conductores, receptores, transceptores(17835)
- Procesamiento de vídeo lineal(2909)
- Comparadores lineales(5084)
- Multiplicadores lineales-analógicos, divisores(263)
- Linear - Amplificadores - Amperios de video y módulos(1905)
- Linear-amplificadores-propósito especial(1856)
- Linear - Amplificadores - Instrumentación, AMP OP, AMP de búfer(34236)
- Amplificadores lineales-audio(4567)
- Interfaz-grabación de voz y reproducción(556)
- Interfaz - Uarts (transmisor de receptor asíncrono universal)(1237)
- Interface-Telecom(4467)
- Interfaz-especializado(4833)
- Terminadores de señal de interfaz(333)
- Interfaz: buffers de señal, repetidores, divisores(1449)
- Serializadores de interfaz, deserializadores(1480)
- Interfaces del sensor y del detector(1524)
- Interfaces-módulos(169)
- Interfaz-módems-ICS y módulos(407)
- Expansores de e/s de interfaz(1136)
- Interfaz-filtros-activo(1226)
- Interfaz: codificadores, decodificadores, convertidores(714)
- Interface-drivers, receptores, transceptores(20755)
- Interfaz-síntesis digital directa (DDS)(117)
- Controladores de interfaz(3628)
- Interfaces-codecs(1676)
- Interfaz: interruptores analógicos, multiplexores, demultiplexores(12567)
- Interfaz-switches analógicos-propósito especial(2533)
- Embedded-sistema en la viruta (SOC)(4496)
- Encajado-PLDs (dispositivo lógico programable)(971)
- Embebido-microprocesadores(10083)
- Embebido-microcontroladores-aplicación específica(2275)
- Embebido-microcontroladores(99285)
- Incrustado: microcontrolador, microprocesador, módulos FPGA(1527)
- Incrustado - FPGAS (matriz de compuerta programable de campo) con microcontroladores(81)
- Incrustado - FPGAS (matriz de compuerta programable de campo)(27747)
- Embedded-DSP (procesadores de señal numérica)(4081)
- Incrustado - CPLDS (dispositivos lógicos programables complejos)(5187)
- Adquisición de datos: controladores de pantalla táctil(1210)
- Adquisición de datos: convertidores digitales a analógicos (DAC)(14419)
- Adquisición de datos-potenciómetros digitales(6250)
- Adquisición de datos: conversores analógicos a digitales (ADC)(17776)
- Adquisición de datos-front end analógico (AFE)(787)
- Adquisición de datos-ADCS/DACS-propósito especial(3043)
- Reloj/sincronización-relojes de tiempo real(2446)
- Reloj/sincronización: temporizadores y osciladores programables(23469)
- Baterías del reloj/de la sincronización-IC(4)
- Líneas de retraso de reloj/temporización(1049)
- Reloj/sincronización - Generadores de reloj, PLLS, sintetizadores de frecuencia(32775)
- Búferes reloj/temporizador, Controladores(4568)
- Reloj/sincronización-específico de la aplicación(8652)
- Audio especial propósito(1564)
Fabricante relevante







-
Productos semiconductores discretos
Productos semiconductores discretos
- Regulación actual: diodos, transistores(1090)
- Transistores-propósito especial(226)
- Transistores-Unijunction programable(48)
- Transistores-JFETs(1558)
- Transistores-IGBTs-escoja(4799)
- Transistores-IGBTs-módulos(63420)
- Transistores-IGBTs-matrices(26)
- Transistores-FETs, MOSFETs-escoja(48330)
- Transistores-FETs, MOSFETs-RF(4903)
- Transistores-FETs, MOSFETs-matrices(6641)
- Transistores-bipolar (BJT)-solo, presesgado(4539)
- Transistores bipolares (BJT)-Single(25800)
- Transistores-bipolar (BJT)-RF(2087)
- Transistores-bipolar (BJT)-matrices presesgadas(2115)
- Transistores-bipolar (BJT)-matrices(2310)
- Tiristores-triacs(4044)
- Tiristores-SCRS-módulos(3967)
- Tiristores-SCRS(5436)
- Tiristores-Diacs, sidacs(319)
- Módulos de controladores de potencia(1627)
- Diodos-Zener-Single(87483)
- Diodos Zener-arrays(2619)
- Diodos: capacitancia variable (varicaps, varactores)(1200)
- Diodos-RF(2753)
- Diodos-rectificadores-Single(67528)
- Diodos-rectificadores-matrices(20581)
- Diodos-puentes rectificadores(11700)
Fabricante relevante




-
RF/if y RFID
RF/if y RFID
- Tarjetas del módulo de identificación de suscriptores (SIM)(77)
- Ciruladores y aisladores de RF(1742)
- RFID, acceso del RF, ICS de la supervisión(1550)
- Transpondedores RFID, Tags(747)
- Módulos de lector RFID(464)
- Kits de evaluación y desarrollo de RFID, tableros(30)
- Antenas RFID(329)
- RFI y EMI-blindaje y absorción de materiales(6444)
- RFI y EMI-contactos, Fingerstock y juntas(7497)
- Transmisores RF(668)
- Módulos del transmisor-receptor del RF(6900)
- Transmisor-receptor ICS del RF(4169)
- Interruptores RF(9276)
- Escudos RF(16401)
- Receptores RF(1998)
- RF receptor, transmisor y transceptor terminados(2763)
- Divisores/divisores de energía del RF(1223)
- Regulador de energía del RF ICS(86)
- Moduladores de RF(710)
- Mezcladores RF(2800)
- RF Misc ICS y módulos(3276)
- RF front end (LNA + PA)(419)
- Kits de evaluación y desarrollo de RF, juntas(747)
- Acoplador direccional del RF(2718)
- Diplexores RF(1464)
- Detectores de RF(412)
- Demoduladores de RF(249)
- Antenas RF(12319)
- Amplificadores RF(19651)
- Balun(1496)
- Atenuadores(4852)
Fabricante relevante







-
Optoelectrónica
Optoelectrónica
- Optomecánico(480)
- Aparatos de iluminación(125)
- Diodos láser, módulos láser: entrega láser, fibras láser(345)
- Hene láser sistemas(31)
- Cabezas láser hene(27)
- Mostrar luz de fondo(93)
- Iluminación de xenón(387)
- Recubrimientos de pantalla táctil(453)
- Indicadores del panel, luces piloto(75729)
- Óptica-fuente de luz del fósforo alejado(269)
- Óptica-reflectores(665)
- Óptica-tubos de luz(5384)
- Óptica-lentes(4951)
- LEDs-espaciadores, separadores(2718)
- LED-reemplazos de lámparas(29718)
- LED: indicadores de placa de circuito, matrices, barras de luz, gráficos de barras(9083)
- LED productos termales(667)
- Kits de iluminación LED(64)
- LED de iluminación-blanco(37580)
- LED de iluminación de color(4728)
- Iluminación LED-mazorcas, motores, módulos(28735)
- Indicación del LED-discreto(27601)
- Diodos Láser, Módulos(1553)
- Lámparas incandescentes, neones(311004)
- Lámparas-cátodo frío fluorescente (CCFL) y UV(164)
- Inversores(7728)
- Emisores infrarrojos, UV, visibles(3871)
- Fibra óptica - transmisores - circuitos de accionamiento integrados(4085)
- Fibra óptica-transmisores-discreto(350)
- Fibra óptica-modulos transceptores(18758)
- Fibra óptica: interruptores, multiplexores, demultiplexores(1387)
- Fibra óptica-receptores(695)
- Fibra óptica-atenuadores(654)
- Electroluminiscente(102)
- Pantalla, controlador de interfaz de monitor(98)
- Módulos de exhibición-vacío fluorescente (VFD)(249)
- Módulos de visualización: matriz de puntos LED y clúster(865)
- Módulos de visualización: carácter LED y numérico(5421)
- Módulos de pantalla-LCD, OLED, gráfico(4654)
- Módulos de visualización: LCD, carácter OLED y numérico(2202)
- Biseles de la exhibición, lentes(88)
- Direccionable, especialidad(458)
Fabricante relevante







-
Sensores, transductores
Sensores, transductores
- Receptores ultrasónicos, transmisores - industrial(115)
- Sensores de temperatura - termostatos - mecánico - industrial(3103)
- Sensores de temperatura - Salida analógica y digital - Industrial(209)
- Sensores de proximidad - Industrial(13611)
- Sensores de presión, transductores - industrial(26503)
- Sensores ópticos - Fotónica - Contadores, detectores, SPCM (módulo de conteo de fotones individuales)(751)
- Sensores ópticos: módulos de cámara(875)
- Sensores magnéticos - posición, proximidad, velocidad (módulos) - industrial(554)
- Sensores de fuerza - Industrial(346)
- Sensores de flujo - Industrial(151)
- Flotante, sensores de nivel - industrial(310)
- Codificadores - industrial(4980)
- Sensores de color - Industrial(50)
- Sensores táctiles(100)
- Receptores ultrasónicos, transmisores(2421)
- Sensores de temperatura - termostatos - estado sólido(1096)
- Sensores de temperatura-termostatos-mecánicos(3397)
- Sensores de temperatura: termopares, sondas de temperatura(1921)
- Sensores de temperatura: RTD (detector de temperatura de resistencia)(1525)
- Sensores de temperatura-termistores PTC(2273)
- Sensores de temperatura-NTC Termistores(13259)
- Sensores de temperatura: salida analógica y digital(3928)
- Calibradores de tensión(1399)
- Sensores especializados(1861)
- Células solares(503)
- Sensores de choque(84)
- Interfaz del sensor-bloques de la ensambladura(2519)
- Asambleas de cables de sensores(22011)
- Sensores de proximidad/ocupación: unidades terminadas(725)
- Sensores de proximidad(2860)
- Sensores de presión, transductores(11317)
- Sensores de posición: ángulo, medición de posición lineal(6022)
- Sensores ópticos-reflexivo-salida lógica(194)
- Sensores ópticos-reflectantes-salida analógica(432)
- Sensores ópticos-fototransistores(1027)
- Sensores ópticos - Fotos Interruptores - Tipo de ranura - Salida del transistor(1427)
- Sensores ópticos - Photointerrupters - Tipo de ranura - Salida lógica(1215)
- Sensores ópticos-fotoeléctricos, industriales(16763)
- Sensores ópticos-fotodiodos(1543)
- Sensores ópticos - Detectores de fotos - Receptor remoto(2605)
- Sensores ópticos - Detectores de fotos - Salida lógica(146)
- Sensores ópticos - Detectores de fotos - Celdas CDS(74)
- Sensores ópticos-medición de la distancia(377)
- Sensores ópticos: luz ambiental, IR, sensores UV(1305)
- Multifunción(558)
- Sensores de movimiento-vibración(337)
- Sensores de movimiento: interruptores de inclinación(67)
- Sensores de movimiento-ópticos(719)
- Sensores de movimiento-inclinómetros(175)
- Sensores de movimiento: imus (unidades de medición inerciales)(416)
- Sensores de movimiento-giroscopios(214)
- Sensores de movimiento-acelerómetros(1911)
- Imanes-sensor emparejado(119)
- Imanes-multipropósito(1965)
- Sensores magnéticos-interruptores (estado sólido)(3700)
- Sensores magnéticos: posición, proximidad, velocidad (módulos)(5199)
- Sensores magnéticos-lineal, brújula (ICS)(1247)
- Sensores magnéticos: brújula, campo magnético (módulos)(35)
- Transductores LVDT (transformador diferencial de variable lineal)(204)
- Módulos de transmisor-receptor IrDA(196)
- Sensores de imagen, cámara(2235)
- Humedad, sensores de humedad(1425)
- Sensores de gas(1217)
- Sensores de fuerza(188)
- Sensores de flujo(550)
- Flotador, sensores de nivel(1343)
- Codificadores(6357)
- Sensores de polvo(43)
- Transductores de corriente(3455)
- Sensores de color(85)
- Amplificadores(1905)
Fabricante relevante







-
Conectores, interconexiones
Conectores, interconexiones
- Conectores USB, DVI, HDMI(446)
- Conectores de iluminación de estado sólido(555)
- SOCKETS para ICS, transistores(953)
- Conectores conectables(1221)
- Conectores fotovoltaicos (panel solar)(136)
- Conectores de fibra óptica(370)
- FFC, conectores FPC (plano flexible)(761)
- Conectores D-Sub, en forma de D(2887)
- Conectores coaxiales (RF)(2389)
- Conectores circulares(14162)
- Conectores de alimentación de tipo cuchilla(273)
- Enchufes y receptáculos(2597)
- USB, DVI, conectores HDMI-adaptadores(572)
- Conectores USB, DVI, HDMI(4298)
- Bornes-conectores de cables a bordo(217)
- Terminales-conectores de empalme de alambre(4322)
- Terminales-conectores de clavija de alambre(328)
- Terminales-conectores de torreta(1273)
- Terminales-conectores especializados(2042)
- Terminales-conectores de pala(3902)
- Terminales-conectores de orejetas de soldadura(345)
- Terminales-conectores de tornillo(745)
- Terminales-conectores de anillo(12596)
- Terminales-conectores rectangulares(4747)
- Terminales: conectas rápidas, conectores de desconexión rápida(8514)
- Terminales-PC PIN, conectores de un solo poste(3776)
- Terminales: receptáculos de pin de PC, conectores de zócalo(5883)
- Terminales-conectores de cables magnéticos(1653)
- Terminales-conectores de cuchillas(112)
- Terminales-carcasas, botas(2850)
- Terminales-conectores de aluminio(108)
- Terminales-barril, conectores de bala(1107)
- Terminales-adaptadores(137)
- Regletas de bornes y placas de torreta(1159)
- Sistemas de Unión terminal(2533)
- Bloques de terminales-cable a bordo(43615)
- Bloques de terminales-especializados(3722)
- Bloques de terminales-distribución de energía(847)
- Bloques de terminales-panel de montaje(1359)
- Bloques de terminales-módulos de interfaz(1819)
- Bloques de terminales: encabezados, enchufes y enchufes (119920)
- Bloques de terminales-riel DIN, canal(9373)
- Bloques de terminales-contactos(65)
- Bloques de terminales-bloques de barrera(47517)
- Bloques de terminales-adaptadores(1059)
- Conectores de iluminación de estado sólido: contactos(271)
- Conectores de iluminación de estado sólido(1344)
- Zócalos para ICS, transistores-adaptadores(275)
- SOCKETS para ICS, transistores(22148)
- Shunts, puentes(907)
- Conectores rectangulares-muelles cargados(7721)
- Conectores rectangulares-carcasa(43023)
- Conectores rectangulares: encabezados, pin especializado(6129)
- Conectores rectangulares: encabezados, receptáculos, enchufes femeninos(229601)
- Conectores rectangulares-cabeceras, pernos macho(543338)
- Conectores rectangulares: colgación libre, montaje en panel(30142)
- Conectores rectangulares-contactos(10681)
- Conectores rectangulares: placa, cable directo a la placa(2432)
- Conectores rectangulares-adaptadores(475)
- Rectangular: conectores de placa a placa: encabezados, receptáculos, enchufes femeninos(9)
- Rectangular - Conectores de placa a placa - encabezados, alfileres masculinos(2)
- Conectores rectangulares: espaciadores de placa, apiladores (placa a placa)(238901)
- Conectores rectangulares: matrices, tipo de borde, entrepiso (tablero a tablero)(37853)
- Conectores de entrada de energía: entradas, puntos de venta, módulos(10310)
- Conectores conectables(6049)
- Conectores fotovoltaicos (panel solar): contactos(77)
- Conectores fotovoltaicos (panel solar)(504)
- Conectores modulares-bloques de cableado(99)
- Conectores modulares-tapones(1674)
- Conectores modulares-cajas de enchufe(181)
- Conectores modulares-jacks con magnetismo(10152)
- Conectores modulares-jacks(23416)
- Conectores modulares-adaptadores(855)
- Conectores de memoria-tarjetas PC-adaptadores(21)
- Conectores de memoria-PC Card Sockets(3299)
- Conectores de memoria-zócalos de módulo en línea(3390)
- Conectores LGH(764)
- Keystone-insertos(2758)
- Keystone-placas frontales, marcos(1926)
- Conectores resistentes-insertos, módulos(4190)
- Conectores resistentes-carcasas, campanas, bases(17226)
- Conectores de trabajo pesado-marcos(523)
- Conectores de trabajo pesado-contactos(1832)
- Conectores resistentes-ensamblajes(671)
- Conectores de fibra óptica-carcasa(919)
- Conectores de fibra óptica - Adaptadores(4455)
- Conectores de fibra óptica(3001)
- Conectores FFC, FPC (plano flexible) - carcasas(652)
- Conectores FFC, FPC (Flat flexible)-contactos(202)
- FFC, conectores FPC (plano flexible)(18691)
- D-sub, conectores en forma de d-terminadores(47)
- D-sub, conectores en forma de d-carcasa(12238)
- D-sub, conectores en forma de d-contactos(2714)
- D-sub, conectores en forma de d-conchas, campanas(5995)
- D-sub, conectores en forma de d-adaptadores(1304)
- Conectores d-sub(141346)
- Conectores en forma de d-Centronics(8770)
- Contactos, muelle cargado y presión(630)
- Contactos-multiusos(6196)
- Contactos-Leadframe(122)
- Conectores coaxiales (RF)-terminadores(1231)
- Conectores coaxiales (RF)-contactos(480)
- Conectores coaxiales (RF)-adaptadores(6386)
- Conectores coaxiales (RF)(25734)
- Conectores circulares-carcasa(441226)
- Conectores circulares-contactos(4737)
- Conectores circulares: frascos y abrazaderas de cable(53692)
- Conectores circulares-adaptadores(8839)
- Conectores circulares(1196254)
- Conectores de borde de tarjeta-carcasa(469)
- Conectores de borde de la tarjeta: conectores de borde(672683)
- Conectores de borde de tarjeta-contactos(325)
- Conectores de borde de tarjeta-adaptadores(73)
- Conectores de alimentación de tipo cuchilla: carcasas(837)
- Conectores de alimentación de tipo cuchilla: contactos(393)
- Conectores de alimentación de tipo cuchilla(4163)
- Entre adaptadores de serie(649)
- Conectores de alimentación de barril(935)
- Conectores de audio de barril(2432)
- Adaptadores de audio de barril(92)
- Conectores de banana y puntas-jacks, tapones(1644)
- Conectores de banana y puntas-postes de Unión(239)
- Conectores de plátano y puntas-adaptadores(75)
- Conectores de planeo-especializados(45586)
- Conectores planas-carcasa(6863)
- Conectores de planeo-métrico duro, estándar(6297)
- Conectores planas-DIN 41612(9408)
- Conectores de planeo-contactos(3583)
- Conectores de placa de ARINC-insertos(2357)
- Conectores planos-ARINC(3789)
Fabricante relevante







-
Resistencias
-
Condensadores
Condensadores
- Condensadores electrolíticos de aluminio(16817)
- Trimmers, condensadores variables(3151)
- Condensadores de película delgada(3473)
- Condensadores de tantalio(136103)
- Condensadores del tantalio-polímero(9778)
- Condensadores de silicio(320)
- Condensadores de óxido de niobio(330)
- Condensadores de la mica y de PTFE(9101)
- Condensadores de película(150406)
- Condensadores de doble capa eléctrica (EDLC), supercondensadores(2782)
- Condensadores cerámicos(833829)
- Redes de capacitores, matrices(2383)
- Condensadores electrolíticos de aluminio(125325)
- Condensadores de polímero de aluminio(7544)
Fabricante relevante






-
Transformadores
Transformadores
Fabricante relevante







-
Aisladores
-
Cristales, osciladores, resonadores
-
Interruptores
Interruptores
- Interruptores de enclavamiento(2893)
- Switches de parada de emergencia (E-Stop)(1160)
- Conmutadores de cable(571)
- Interruptores de conmutación(33608)
- Interruptores rueda(742)
- Interruptores táctiles(14263)
- Acción Snap, interruptores de límite(28077)
- Interruptores deslizantes(5166)
- Interruptores selector(9720)
- Interruptores rotativos(13850)
- Interruptores basculantes(53790)
- Interruptores de botones-efecto Hall(127)
- Interruptores pulsadores(190826)
- Interruptores de pantalla programables(39)
- Interruptores de navegación, joystick(1882)
- Interruptores magnéticos de Reed(1399)
- Interruptores del telclado numérico(637)
- Interruptores de bloqueo(3684)
- Interruptores DIP(7747)
- Componentes de conmutación configurable-lente(1435)
- Componentes de interruptor configurables: fuente de iluminación(1236)
- Componentes de interruptor configurables: bloque de contacto(1401)
- Componentes de conmutación configurable-cuerpo(16077)
- Componentes del interruptor de desconexión(2567)
Fabricante relevante






-
Relés
Relés
- Relevos de seguridad(1310)
- Reed Rees(1735)
- Relés de alta frecuencia (RF)(1190)
- Contactores (estado sólido)(686)
- Contactores (Electromecánicos)(11952)
- Relés automotrices(1881)
- Relés de estado sólido(10652)
- Relés de señal, hasta 2 amperios(9149)
- Zócalos del Relais(2075)
- Relés de potencia, más de 2 amperios(31604)
- Módulos de relé de E / S(712)
- Módulos de relé de e/s-entrada(2)
- Racks de módulo de relé de e/s(247)
Fabricante relevante






















Seleccione el idioma
Idioma actual
español
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Cómo funciona el DRV8871 para el control de motores de CC con escobillas
Tiempo: 14/05/2026
Navegar: 56
El DRV8871 es un controlador de motor para controlar un motor de CC con escobillas en proyectos electrónicos pequeños y medianos.Es útil cuando necesita un control de velocidad suave, rotación hacia adelante y hacia atrás y una mejor protección que los módulos de controlador de motor más antiguos.Este artículo analizará qué es el DRV8871, sus características principales, funciones de los pines, funcionamiento interno, proceso de cableado, ejemplos de control de Arduino, problemas comunes, comparaciones con otros controladores de motor y más.

Catálogo
¿Qué es el controlador de motor DRV8871?
el DRV8871 es un CI de controlador de motor de CC con escobillas que se utiliza para controlar la velocidad y la dirección de un solo motor de CC.Utiliza un diseño de puente H, por lo que el motor puede girar hacia adelante o hacia atrás según las señales de entrada de un microcontrolador.DRV8871 admite control de velocidad PWM y puede manejar voltajes de suministro de motor de 6,5 V a 45 V.El DRV8871 también incluye funciones de protección y regulación de corriente, lo que ayuda a proteger el motor y el controlador durante el arranque, la sobrecarga o las condiciones de bloqueo.
Características del DRV8871
• Controlador de motor de puente H – Controla un motor CC con escobillas con capacidad de rotación hacia adelante y hacia atrás.
• Amplio rango de voltaje de funcionamiento (6,5 V a 45 V) – Admite aplicaciones de motores de bajo y alto voltaje.
• Unidad de corriente máxima de 3,6 A. – Maneja altas demandas de arranque y corriente transitoria del motor.
• Salida MOSFET RDS baja (activada) – Reduce la pérdida de energía y la generación de calor durante el funcionamiento.
• Control de velocidad PWM – Permite un ajuste suave de la velocidad del motor utilizando señales PWM de un microcontrolador.
• Regulación actual sin resistencia de detección – Utiliza detección de corriente interna para simplificar el diseño del circuito.
• Modo de suspensión de bajo consumo – Minimiza el consumo de energía cuando el motor está inactivo.
• Paquete HSOP compacto – El paquete pequeño de 8 pines ayuda a ahorrar espacio en la PCB en diseños compactos.
• Bloqueo por subtensión (UVLO) – Protege al controlador cuando la tensión de alimentación es demasiado baja.
• Protección contra sobrecorriente (OCP) – Evita que una corriente excesiva dañe el controlador o el motor.
• Apagado térmico (TSD) – Desactiva automáticamente el controlador durante condiciones de sobrecalentamiento.
• Recuperación automática de fallas – Restaura el funcionamiento normal después de eliminar las condiciones de falla.
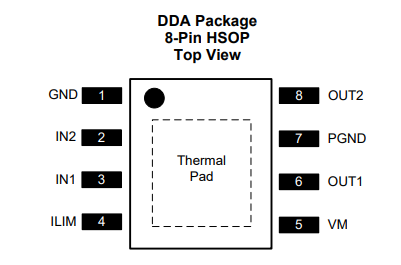
Distribución de pines y funciones de pines del DRV8871
|
Alfiler |
Nombre |
Función |
|
1 |
Tierra |
suelo
Conexión para circuitos lógicos y de control. |
|
2 |
IN2 |
Entrada lógica utilizada
para controlar la dirección del motor y la operación de frenado. |
|
3 |
EN1 |
Entrada lógica utilizada
junto con IN2 para dirección del motor y control PWM. |
|
4 |
ILIM |
Configura el motor
límite de corriente mediante una resistencia externa. |
|
5 |
máquina virtual |
Potencia del motor principal
voltaje de entrada de suministro. |
|
6 |
SALIDA1 |
Salida del motor
terminal conectado a un lado del motor de CC. |
|
7 |
PGND |
Tierra eléctrica
Conexión para la ruta de retorno de corriente del motor. |
|
8 |
OUT2 |
Salida del motor
terminal conectado al otro lado del motor de CC. |
|
— |
Almohadilla térmica |
Ayuda a disipar
Calienta y mejora el rendimiento térmico del IC. |
Cómo funciona internamente el DRV8871
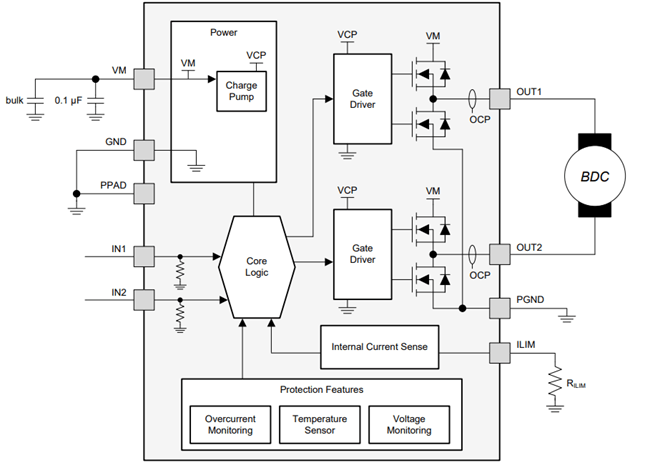
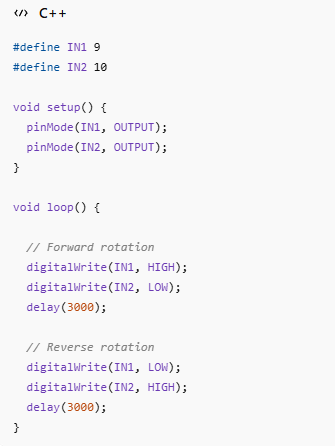
Como se muestra en el diagrama de bloques funcionales, el DRV8871 utiliza un puente H interno formado por cuatro MOSFET para controlar la dirección y la velocidad de un motor de CC con escobillas.Las entradas lógicas IN1 e IN2 controlan cómo fluye la corriente a través del motor conectado a OUT1 y OUT2, lo que permite la rotación hacia adelante, la rotación hacia atrás, el frenado o el funcionamiento en modo de inercia.Los controladores de compuerta internos y la bomba de carga ayudan a cambiar los MOSFET de manera eficiente para el control de velocidad del motor PWM.
El diagrama también muestra los circuitos internos de protección y detección de corriente del DRV8871.El pin ILIM utiliza una resistencia externa para establecer el límite de corriente del motor, lo que ayuda a reducir la corriente excesiva de arranque o parada.Durante condiciones de sobrecarga, el controlador regula automáticamente la corriente mediante corte de corriente PWM para proteger el motor y la fuente de alimentación.Esto mejora la confiabilidad del sistema y reduce los problemas de sobrecalentamiento en aplicaciones reales.
El DRV8871 también incluye funciones de protección integradas, como monitoreo de sobrecorriente, detección de temperatura y monitoreo de voltaje.Si ocurre una condición de falla, el controlador puede apagarse temporalmente y recuperarse automáticamente cuando regresen las condiciones normales.En aplicaciones de bajo consumo, el dispositivo puede entrar en modo de suspensión para reducir el consumo de energía cuando el motor no está funcionando.
DRV8871 Regulación actual y operación PWM
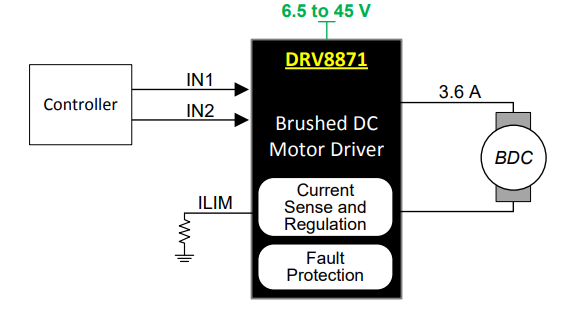
Diagrama esquemático simplificado, el DRV8871 utiliza entradas de control IN1 e IN2 para gestionar el funcionamiento del motor de CC con escobillas.El controlador incluye detección de corriente interna, protección contra fallas y un pin ILIM que permite ajustar el límite de corriente del motor mediante una resistencia externa.Esto ayuda a proteger el motor y la fuente de alimentación contra una corriente de arranque o de parada excesiva.
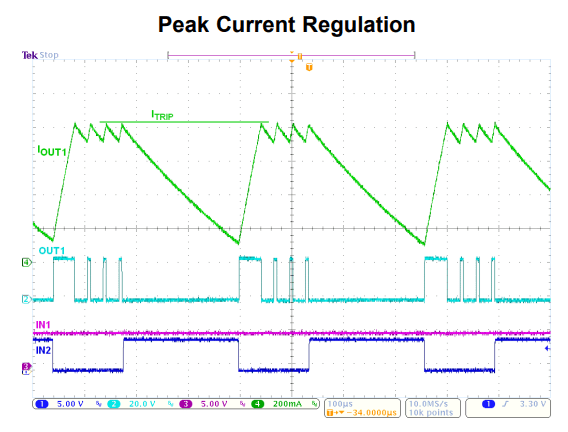
La imagen de forma de onda demuestra cómo el DRV8871 realiza la regulación de corriente PWM durante el funcionamiento.Cuando la corriente del motor alcanza el límite programado, el controlador utiliza automáticamente el corte de corriente PWM para reducir la corriente y mantener un funcionamiento seguro.La forma de onda también muestra el comportamiento de caída de la corriente a medida que la corriente del motor aumenta y disminuye durante los ciclos de conmutación PWM.Este método de regulación mejora la confiabilidad del motor, reduce el sobrecalentamiento y ayuda a proporcionar un control más suave del motor.
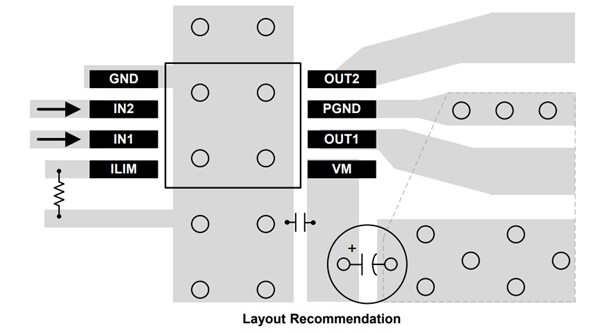
Proceso de cableado y conexión DRV8871
Conexión básica del controlador del motor DRV8871 con un Arduino Uno.Los pines de control IN1 e IN2 del DRV8871 están conectados a los pines digitales 9 y 10 de Arduino para controlar la dirección del motor y el control de velocidad PWM.Las tierras tanto del Arduino como del DRV8871 deben estar conectadas entre sí para establecer una referencia común para la comunicación de señales.
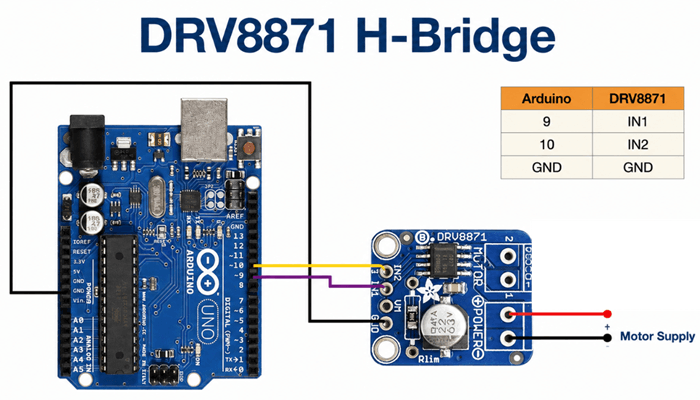
El motor de CC está conectado a los terminales de salida del motor del DRV8871, mientras que una fuente de alimentación externa del motor está conectada a los terminales de alimentación VM y GND.El suministro del motor debe coincidir con los requisitos de voltaje del motor que se utiliza.Dado que los motores de CC pueden consumir una alta corriente de arranque, el motor no debe alimentarse directamente desde el pin Arduino de 5 V.
El DRV8871 también puede funcionar con placas ESP32 porque sus entradas lógicas son compatibles con señales de control PWM de microcontroladores modernos.Cuando se utiliza ESP32, se aplica el mismo principio de conexión: conecte los pines GPIO con capacidad PWM a IN1 e IN2, conecte las tierras juntas y use una fuente de alimentación de motor separada para la entrada de voltaje del motor.
Para un funcionamiento estable, se recomienda colocar condensadores a granel cerca de la entrada de alimentación del VM para reducir las caídas de voltaje y el ruido eléctrico generado por el motor.Los componentes de protección y el cableado adecuado ayudan a prevenir reinicios aleatorios, funcionamiento inestable del motor, sobrecalentamiento y problemas de comunicación causados por picos de corriente del motor.
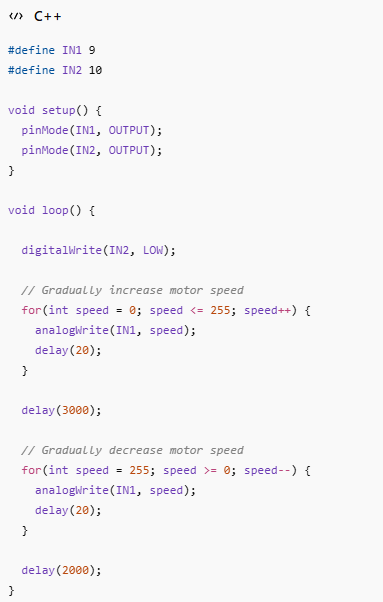
Ejemplo de código Arduino para DRV8871
Código básico de rotación del motor
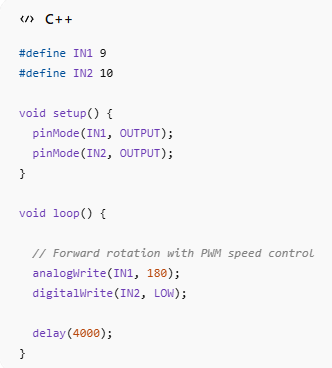
Ejemplo de control de velocidad PWM
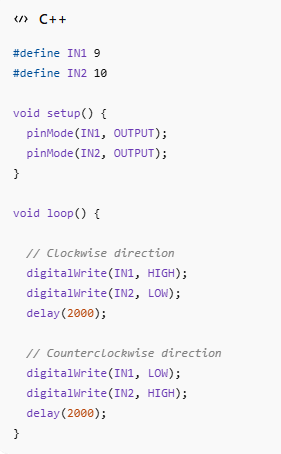
Ejemplo de control de dirección
Ejemplo de arranque suave usando PWM
Problemas comunes y solución de problemas
|
problema |
Posible
causa |
Solución de problemas
Solución |
|
motor no
girando |
Cableado incorrecto
o sin suministro de energía del motor |
Consulte SALIDA1,
Conexiones OUT2, VM y GND y verifique el voltaje de suministro del motor. |
|
DRV8871
sobrecalentamiento |
motor excesivo
refrigeración actual o insuficiente |
Reducir motores
cargar, reducir el voltaje de suministro o mejorar la disipación de calor de la PCB. |
|
Solo motor
gira en una dirección |
EN1 o EN2
problema de señal de control |
Verificar Arduino
o señales de salida del microcontrolador y conexiones de cableado. |
|
El motor vibra
pero no gira |
Baja oferta
fuente de alimentación actual o débil |
Utilice un
fuente de alimentación externa de mayor corriente para el motor. |
|
Arduino se reinicia
durante el arranque del motor |
Caída de voltaje
causado por picos de corriente del motor |
Agregar masa
condensadores cerca de VM y utilice fuentes de alimentación lógicas y de motor separadas. |
|
El conductor cierra
caer inesperadamente |
sobrecorriente o
protección térmica activada |
comprobar el motor
condiciones de calado, cortocircuitos o carga excesiva. |
|
velocidad pwm
control no funciona |
PWM incorrecto
configuración de pin o código |
asegurar
Se utilizan pines GPIO compatibles con PWM y configuraciones correctas de analogWrite(). |
|
Velocidad del motor
inestable |
Ruido electrico
o mala conexión a tierra |
mejorar
diseño de conexión a tierra y, si es posible, acorte el cableado del motor. |
|
No hay respuesta de
DRV8871 |
Modo de suspensión
problema activado o lógico |
Verifique IN1 y
Estados de entrada IN2 y verifique las conexiones de la fuente de alimentación. |
|
El motor funciona
lentamente |
Tensión de alimentación
demasiado bajo |
usa un motor
tensión de alimentación que coincida con las especificaciones del motor. |
|
excesivo
ruido electrico |
desaparecido
condensadores de filtrado |
Añadir derivación y
condensadores a granel cerca de la entrada de energía del controlador del motor. |
|
funcionamiento corto
tiempo en sistemas de baterías |
Motor alto
consumo actual |
Reducir motores
cargar u optimizar la configuración de control de velocidad PWM. |
DRV8871 frente a otros controladores de motor
DRV8871 frente a L298N
El DRV8871 y L298N Ambos son controladores de motor de CC con escobillas que se utilizan para el control de velocidad y dirección del motor, pero están diseñados con tecnologías muy diferentes.El L298N utiliza salidas de transistores bipolares más antiguas, mientras que el DRV8871 utiliza conmutación MOSFET moderna, lo que hace que el DRV8871 sea más eficiente y capaz de producir menos calor durante el funcionamiento.Ambos controladores admiten el control del motor PWM y la rotación bidireccional del motor, pero el DRV8871 proporciona una mejor eficiencia energética, regulación de corriente incorporada y funciones de protección mejoradas.
El DRV8871 es generalmente la mejor opción para la robótica moderna y los sistemas integrados porque es más pequeño, más eficiente y más fácil de integrar en proyectos compactos.El L298N sigue siendo popular entre los principiantes debido a su bajo costo y sus módulos fáciles de encontrar, pero desperdicia más energía y a menudo se calienta bajo carga.Para sistemas que funcionan con baterías o aplicaciones de mayor eficiencia, el DRV8871 suele ser la opción superior.
DRV8871 frente a TB6612FNG
El DRV8871 y TB6612FNG Ambos son controladores de motor basados en MOSFET diseñados para un control eficiente de motores de CC con menor generación de calor que los controladores más antiguos como el L298N.Ambos admiten control de velocidad PWM y operación de motor de avance/retroceso, lo que los hace adecuados para robótica y proyectos integrados.Sin embargo, el TB6612FNG está diseñado principalmente para aplicaciones de bajo voltaje, mientras que el DRV8871 admite un rango de voltaje operativo mucho más amplio y una mayor capacidad de corriente del motor.
El DRV8871 es mejor para motores de mayor potencia y aplicaciones que requieren limitación de corriente y funciones de protección más sólidas.Por el contrario, el TB6612FNG suele ser el preferido para robots más pequeños y sistemas compactos de bajo voltaje porque puede controlar dos motores en un chip.Si el proyecto requiere un mayor manejo de voltaje y una mejor protección del motor, el DRV8871 suele ser la mejor opción.
DRV8871 frente a BTS7960
El DRV8871 y BTS7960 Ambos son controladores de motor de alta corriente diseñados para el control de motores de CC con escobillas, pero apuntan a diferentes niveles de potencia.El DRV8871 está diseñado para motores de potencia media y sistemas integrados compactos, mientras que el BTS7960 está diseñado para motores mucho más grandes que requieren una capacidad de corriente muy alta.Ambos admiten control de velocidad PWM y funcionamiento bidireccional del motor, pero el BTS7960 puede manejar una corriente de motor continua significativamente mayor.
El DRV8871 es mejor para diseños compactos, robótica más pequeña y sistemas que requieren regulación y protección de corriente integradas en un paquete pequeño.El BTS7960 es más adecuado para aplicaciones de servicio pesado, como vehículos eléctricos, actuadores grandes y sistemas de motores de alta potencia.Para motores pequeños y medianos, el DRV8871 suele ser más fácil de usar y más práctico, mientras que el BTS7960 es mejor para cargas de motor muy exigentes.
DRV8871 frente a DRV8833
El DRV8871 y DRV8833 Ambos son controladores de motor desarrollados para un control eficiente de motores de CC utilizando etapas de salida MOSFET.Ambos admiten control PWM, baja generación de calor y funciones de protección integradas.Sin embargo, el DRV8833 está optimizado para dispositivos portátiles de bajo voltaje, mientras que el DRV8871 admite voltajes de suministro de motor mucho más altos y una mayor capacidad de corriente del motor.
El DRV8871 es generalmente mejor para aplicaciones industriales, automotrices y de motores de alto voltaje debido a su rango operativo más amplio y su manejo de corriente más fuerte.El DRV8833 es más adecuado para pequeños robots que funcionan con baterías, dispositivos electrónicos portátiles y sistemas de bajo voltaje donde el tamaño compacto y el bajo consumo de energía son prioridades.Ambos controladores son eficientes, pero la mejor opción depende principalmente del voltaje del motor y los requisitos de corriente del proyecto.
Las mejores aplicaciones para DRV8871
Las aplicaciones comunes del DRV8871 incluyen:
• pequeños vehículos robóticos,
• sistemas transportadores y actuadores,
• cerraduras de puertas inteligentes,
• dispositivos de motor alimentados por baterías,
• bombas y ventiladores,
• robótica educativa,
• y equipos de automatización industrial.
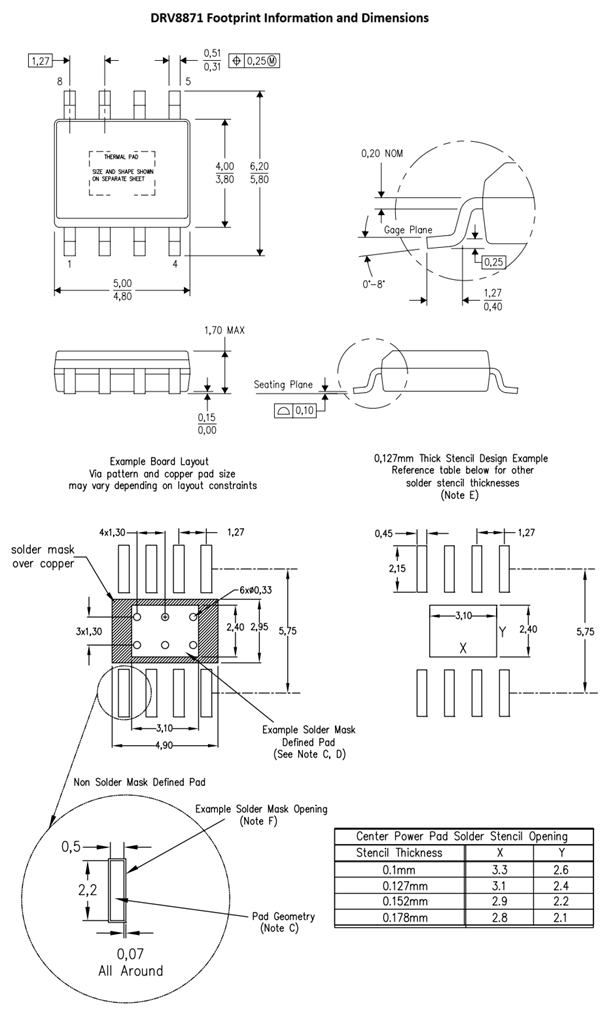
Dimensiones mecánicas y diseño recomendado
¿Vale la pena usar el DRV8871?
Vale la pena usar el DRV8871 si necesita un controlador simple pero confiable para un motor de CC con escobillas.No es la mejor opción para motores muy grandes, pero para proyectos de motores pequeños y medianos, ofrece un buen equilibrio entre potencia, protección y fácil control.Su regulación actual, compatibilidad con PWM y funciones de seguridad integradas lo convierten en una mejor opción que muchos controladores de motor más antiguos, especialmente cuando desea un funcionamiento más suave y menos problemas de sobrecalentamiento.
Preguntas frecuentes [FAQ]
1. ¿Por qué el DRV8871 utiliza la regulación actual y cómo mejora la confiabilidad del motor?
El DRV8871 utiliza regulación de corriente para limitar la corriente excesiva del motor durante el arranque o condiciones de sobrecarga.Esto ayuda a proteger el motor y el controlador contra sobrecalentamiento o daños.
2. ¿Qué ventajas tiene el DRV8871 sobre los controladores de motor más antiguos como el L298N?
El DRV8871 es más eficiente porque utiliza salidas MOSFET en lugar de transistores bipolares más antiguos.Produce menos calor, desperdicia menos energía e incluye mejores funciones de protección.
3. ¿Por qué la fuente de alimentación del motor no debería provenir directamente del pin Arduino 5V?
Los motores de CC pueden consumir mucha corriente que puede restablecer o dañar el Arduino.Una fuente de alimentación de motor independiente proporciona un funcionamiento más seguro y estable.
4. ¿Cómo controla el puente H dentro del DRV8871 la dirección del motor?
El puente H cambia la dirección del flujo de corriente a través del motor.Esto permite que el motor gire hacia adelante o hacia atrás.
5. ¿Qué causa el sobrecalentamiento del DRV8871 en los sistemas de motor?
El sobrecalentamiento suele ser causado por una corriente excesiva del motor, cargas pesadas, refrigeración deficiente o voltaje de suministro incorrecto.
6. ¿Por qué se recomiendan condensadores cerca de la entrada de alimentación VM del DRV8871?
Los condensadores ayudan a reducir las caídas de voltaje y el ruido eléctrico causado por los picos de corriente del motor.Esto mejora la estabilidad general del sistema.
Artículo relacionado
-
![Comprensión de las especificaciones, clases de velocidad y rendimiento de la tarjeta SD]() May 14 2026Comprensión de las especificaciones, clases de velocidad y rendimiento de la tarjeta SD
May 14 2026Comprensión de las especificaciones, clases de velocidad y rendimiento de la tarjeta SDEste artículo analizará qué es una tarjeta SD, su estructura, especificaciones, modos de comunicación, método de almacenamiento, clases de veloci...

Productos relacionados con

C1005NP01H330J050BA
CAP CER 33PF 50V NP0 0402

1206DC104KAT2A
CAP CER 0.1UF 35V X7R 1206
06031A100KAJ2A
CAP CER 10PF 100V NP0 0603

T494B105M025AT
CAP TANT 1UF 20% 25V 1411

ATSAMC20G16A-ANT
IC MCU 32BIT 64KB FLASH 48TQFP

CC1101RGP
IC RF TXRX ISM<1GHZ 20VFQFN

SL811HST-AC/1.5
Cypress QFP

BA5968FP-E2
BA5968FP-E2 ROHM

T491A225M010AH4160
CAP TANT 2.2UF 20% 10V 1206

SAF7730HV/225
SAF7730HV/225 NXP

UC1847L
TI LCC-20

AD7606BBSTZ
8-CH DAS W/16-BIT, BIPOLAR INPUT
