todas las categorias
-
Circuitos integrados (ICS)
Circuitos integrados (ICS)
- Interfaz - Sensor, táctil capacitiva(642)
- ICS especializado(12302)
- PMIC-Reguladores del voltaje-propósito especial(5644)
- PMIC - Reguladores de voltaje - Controladores de reguladores lineales(793)
- PMIC-Reguladores de voltaje-lineal + conmutación(1829)
- PMIC-Reguladores de voltaje-lineal(70981)
- PMIC - Reguladores de voltaje - Reguladores de conmutación de CC DC(39569)
- PMIC - Reguladores de voltaje - Controladores de conmutación de CC DC(13507)
- Referencia del PMIC(9453)
- PMIC-v/f y f/v convertidores(145)
- PMIC-gestión térmica(592)
- PMIC-supervisores(47946)
- PMIC-RMS a los convertidores de la c.c.(170)
- PMIC-controladores de alimentación, monitores(2104)
- PMIC-Power over Ethernet (PoE) controladores(1008)
- PMIC-gestión de la energía-especializado(7722)
- PMIC: interruptores de distribución de energía, controladores de carga(7706)
- PMIC-PFC (corrección de factor de potencia)(1222)
- PMIC-o reguladores, diodos ideales(705)
- PMIC-controladores de motor, Controladores(4712)
- PMIC-Lighting, reguladores del lastre(560)
- PMIC-controladores LED(7282)
- PMIC-controladores láser(573)
- PMIC-Reguladores calientes del intercambio(2816)
- Conductores de la PMIC-puerta(7083)
- PMIC-Full, medio puente conductores(1342)
- PMIC-medición de energía(654)
- PMIC-controladores de pantalla(1435)
- PMIC-regulación/gerencia actuales(1481)
- PMIC-gestión de baterías(5553)
- PMIC-cargadores de batería(3831)
- PMIC - convertidores CA DC, conmutadores fuera de línea(4905)
- Controladores de memoria(358)
- Proms de configuración de memoria para FPGAs(639)
- Memoria-baterías(13)
- Memoria(65694)
- Lógica-universal bus funciones(706)
- Lógica-traductores, cambiadores de nivel(2854)
- Lógica-especialidad lógica(1870)
- Lógica: interruptores de señal, multiplexores, decodificadores(9420)
- Registros de cambios lógicos(2665)
- Lógica-generadores de paridad y damas(335)
- Lógica-multivibradores(831)
- Lógica-pestillos(3658)
- Lógica - puertas e inversores - multifunción, configurable(1687)
- Logic-Gates e inversores(16453)
- Lógica-flip flops(7780)
- Lógica-memoria FIFOs(4240)
- Contadores lógicos, divisores(3456)
- Lógica-comparadores(592)
- Lógica: buffers, conductores, receptores, transceptores(17835)
- Procesamiento de vídeo lineal(2909)
- Comparadores lineales(5084)
- Multiplicadores lineales-analógicos, divisores(263)
- Linear - Amplificadores - Amperios de video y módulos(1905)
- Linear-amplificadores-propósito especial(1856)
- Linear - Amplificadores - Instrumentación, AMP OP, AMP de búfer(34236)
- Amplificadores lineales-audio(4567)
- Interfaz-grabación de voz y reproducción(556)
- Interfaz - Uarts (transmisor de receptor asíncrono universal)(1237)
- Interface-Telecom(4467)
- Interfaz-especializado(4833)
- Terminadores de señal de interfaz(333)
- Interfaz: buffers de señal, repetidores, divisores(1449)
- Serializadores de interfaz, deserializadores(1480)
- Interfaces del sensor y del detector(1524)
- Interfaces-módulos(169)
- Interfaz-módems-ICS y módulos(407)
- Expansores de e/s de interfaz(1136)
- Interfaz-filtros-activo(1226)
- Interfaz: codificadores, decodificadores, convertidores(714)
- Interface-drivers, receptores, transceptores(20755)
- Interfaz-síntesis digital directa (DDS)(117)
- Controladores de interfaz(3628)
- Interfaces-codecs(1676)
- Interfaz: interruptores analógicos, multiplexores, demultiplexores(12567)
- Interfaz-switches analógicos-propósito especial(2533)
- Embedded-sistema en la viruta (SOC)(4496)
- Encajado-PLDs (dispositivo lógico programable)(971)
- Embebido-microprocesadores(10083)
- Embebido-microcontroladores-aplicación específica(2275)
- Embebido-microcontroladores(99285)
- Incrustado: microcontrolador, microprocesador, módulos FPGA(1527)
- Incrustado - FPGAS (matriz de compuerta programable de campo) con microcontroladores(81)
- Incrustado - FPGAS (matriz de compuerta programable de campo)(27747)
- Embedded-DSP (procesadores de señal numérica)(4081)
- Incrustado - CPLDS (dispositivos lógicos programables complejos)(5187)
- Adquisición de datos: controladores de pantalla táctil(1210)
- Adquisición de datos: convertidores digitales a analógicos (DAC)(14419)
- Adquisición de datos-potenciómetros digitales(6250)
- Adquisición de datos: conversores analógicos a digitales (ADC)(17776)
- Adquisición de datos-front end analógico (AFE)(787)
- Adquisición de datos-ADCS/DACS-propósito especial(3043)
- Reloj/sincronización-relojes de tiempo real(2446)
- Reloj/sincronización: temporizadores y osciladores programables(23469)
- Baterías del reloj/de la sincronización-IC(4)
- Líneas de retraso de reloj/temporización(1049)
- Reloj/sincronización - Generadores de reloj, PLLS, sintetizadores de frecuencia(32775)
- Búferes reloj/temporizador, Controladores(4568)
- Reloj/sincronización-específico de la aplicación(8652)
- Audio especial propósito(1564)
Fabricante relevante







-
Productos semiconductores discretos
Productos semiconductores discretos
- Regulación actual: diodos, transistores(1090)
- Transistores-propósito especial(226)
- Transistores-Unijunction programable(48)
- Transistores-JFETs(1558)
- Transistores-IGBTs-escoja(4799)
- Transistores-IGBTs-módulos(63420)
- Transistores-IGBTs-matrices(26)
- Transistores-FETs, MOSFETs-escoja(48330)
- Transistores-FETs, MOSFETs-RF(4903)
- Transistores-FETs, MOSFETs-matrices(6641)
- Transistores-bipolar (BJT)-solo, presesgado(4539)
- Transistores bipolares (BJT)-Single(25800)
- Transistores-bipolar (BJT)-RF(2087)
- Transistores-bipolar (BJT)-matrices presesgadas(2115)
- Transistores-bipolar (BJT)-matrices(2310)
- Tiristores-triacs(4044)
- Tiristores-SCRS-módulos(3967)
- Tiristores-SCRS(5436)
- Tiristores-Diacs, sidacs(319)
- Módulos de controladores de potencia(1627)
- Diodos-Zener-Single(87483)
- Diodos Zener-arrays(2619)
- Diodos: capacitancia variable (varicaps, varactores)(1200)
- Diodos-RF(2753)
- Diodos-rectificadores-Single(67528)
- Diodos-rectificadores-matrices(20581)
- Diodos-puentes rectificadores(11700)
Fabricante relevante




-
RF/if y RFID
RF/if y RFID
- Tarjetas del módulo de identificación de suscriptores (SIM)(77)
- Ciruladores y aisladores de RF(1742)
- RFID, acceso del RF, ICS de la supervisión(1550)
- Transpondedores RFID, Tags(747)
- Módulos de lector RFID(464)
- Kits de evaluación y desarrollo de RFID, tableros(30)
- Antenas RFID(329)
- RFI y EMI-blindaje y absorción de materiales(6444)
- RFI y EMI-contactos, Fingerstock y juntas(7497)
- Transmisores RF(668)
- Módulos del transmisor-receptor del RF(6900)
- Transmisor-receptor ICS del RF(4169)
- Interruptores RF(9276)
- Escudos RF(16401)
- Receptores RF(1998)
- RF receptor, transmisor y transceptor terminados(2763)
- Divisores/divisores de energía del RF(1223)
- Regulador de energía del RF ICS(86)
- Moduladores de RF(710)
- Mezcladores RF(2800)
- RF Misc ICS y módulos(3276)
- RF front end (LNA + PA)(419)
- Kits de evaluación y desarrollo de RF, juntas(747)
- Acoplador direccional del RF(2718)
- Diplexores RF(1464)
- Detectores de RF(412)
- Demoduladores de RF(249)
- Antenas RF(12319)
- Amplificadores RF(19651)
- Balun(1496)
- Atenuadores(4852)
Fabricante relevante







-
Optoelectrónica
Optoelectrónica
- Optomecánico(480)
- Aparatos de iluminación(125)
- Diodos láser, módulos láser: entrega láser, fibras láser(345)
- Hene láser sistemas(31)
- Cabezas láser hene(27)
- Mostrar luz de fondo(93)
- Iluminación de xenón(387)
- Recubrimientos de pantalla táctil(453)
- Indicadores del panel, luces piloto(75729)
- Óptica-fuente de luz del fósforo alejado(269)
- Óptica-reflectores(665)
- Óptica-tubos de luz(5384)
- Óptica-lentes(4951)
- LEDs-espaciadores, separadores(2718)
- LED-reemplazos de lámparas(29718)
- LED: indicadores de placa de circuito, matrices, barras de luz, gráficos de barras(9083)
- LED productos termales(667)
- Kits de iluminación LED(64)
- LED de iluminación-blanco(37580)
- LED de iluminación de color(4728)
- Iluminación LED-mazorcas, motores, módulos(28735)
- Indicación del LED-discreto(27601)
- Diodos Láser, Módulos(1553)
- Lámparas incandescentes, neones(311004)
- Lámparas-cátodo frío fluorescente (CCFL) y UV(164)
- Inversores(7728)
- Emisores infrarrojos, UV, visibles(3871)
- Fibra óptica - transmisores - circuitos de accionamiento integrados(4085)
- Fibra óptica-transmisores-discreto(350)
- Fibra óptica-modulos transceptores(18758)
- Fibra óptica: interruptores, multiplexores, demultiplexores(1387)
- Fibra óptica-receptores(695)
- Fibra óptica-atenuadores(654)
- Electroluminiscente(102)
- Pantalla, controlador de interfaz de monitor(98)
- Módulos de exhibición-vacío fluorescente (VFD)(249)
- Módulos de visualización: matriz de puntos LED y clúster(865)
- Módulos de visualización: carácter LED y numérico(5421)
- Módulos de pantalla-LCD, OLED, gráfico(4654)
- Módulos de visualización: LCD, carácter OLED y numérico(2202)
- Biseles de la exhibición, lentes(88)
- Direccionable, especialidad(458)
Fabricante relevante







-
Sensores, transductores
Sensores, transductores
- Receptores ultrasónicos, transmisores - industrial(115)
- Sensores de temperatura - termostatos - mecánico - industrial(3103)
- Sensores de temperatura - Salida analógica y digital - Industrial(209)
- Sensores de proximidad - Industrial(13611)
- Sensores de presión, transductores - industrial(26503)
- Sensores ópticos - Fotónica - Contadores, detectores, SPCM (módulo de conteo de fotones individuales)(751)
- Sensores ópticos: módulos de cámara(875)
- Sensores magnéticos - posición, proximidad, velocidad (módulos) - industrial(554)
- Sensores de fuerza - Industrial(346)
- Sensores de flujo - Industrial(151)
- Flotante, sensores de nivel - industrial(310)
- Codificadores - industrial(4980)
- Sensores de color - Industrial(50)
- Sensores táctiles(100)
- Receptores ultrasónicos, transmisores(2421)
- Sensores de temperatura - termostatos - estado sólido(1096)
- Sensores de temperatura-termostatos-mecánicos(3397)
- Sensores de temperatura: termopares, sondas de temperatura(1921)
- Sensores de temperatura: RTD (detector de temperatura de resistencia)(1525)
- Sensores de temperatura-termistores PTC(2273)
- Sensores de temperatura-NTC Termistores(13259)
- Sensores de temperatura: salida analógica y digital(3928)
- Calibradores de tensión(1399)
- Sensores especializados(1861)
- Células solares(503)
- Sensores de choque(84)
- Interfaz del sensor-bloques de la ensambladura(2519)
- Asambleas de cables de sensores(22011)
- Sensores de proximidad/ocupación: unidades terminadas(725)
- Sensores de proximidad(2860)
- Sensores de presión, transductores(11317)
- Sensores de posición: ángulo, medición de posición lineal(6022)
- Sensores ópticos-reflexivo-salida lógica(194)
- Sensores ópticos-reflectantes-salida analógica(432)
- Sensores ópticos-fototransistores(1027)
- Sensores ópticos - Fotos Interruptores - Tipo de ranura - Salida del transistor(1427)
- Sensores ópticos - Photointerrupters - Tipo de ranura - Salida lógica(1215)
- Sensores ópticos-fotoeléctricos, industriales(16763)
- Sensores ópticos-fotodiodos(1543)
- Sensores ópticos - Detectores de fotos - Receptor remoto(2605)
- Sensores ópticos - Detectores de fotos - Salida lógica(146)
- Sensores ópticos - Detectores de fotos - Celdas CDS(74)
- Sensores ópticos-medición de la distancia(377)
- Sensores ópticos: luz ambiental, IR, sensores UV(1305)
- Multifunción(558)
- Sensores de movimiento-vibración(337)
- Sensores de movimiento: interruptores de inclinación(67)
- Sensores de movimiento-ópticos(719)
- Sensores de movimiento-inclinómetros(175)
- Sensores de movimiento: imus (unidades de medición inerciales)(416)
- Sensores de movimiento-giroscopios(214)
- Sensores de movimiento-acelerómetros(1911)
- Imanes-sensor emparejado(119)
- Imanes-multipropósito(1965)
- Sensores magnéticos-interruptores (estado sólido)(3700)
- Sensores magnéticos: posición, proximidad, velocidad (módulos)(5199)
- Sensores magnéticos-lineal, brújula (ICS)(1247)
- Sensores magnéticos: brújula, campo magnético (módulos)(35)
- Transductores LVDT (transformador diferencial de variable lineal)(204)
- Módulos de transmisor-receptor IrDA(196)
- Sensores de imagen, cámara(2235)
- Humedad, sensores de humedad(1425)
- Sensores de gas(1217)
- Sensores de fuerza(188)
- Sensores de flujo(550)
- Flotador, sensores de nivel(1343)
- Codificadores(6357)
- Sensores de polvo(43)
- Transductores de corriente(3455)
- Sensores de color(85)
- Amplificadores(1905)
Fabricante relevante







-
Conectores, interconexiones
Conectores, interconexiones
- Conectores USB, DVI, HDMI(446)
- Conectores de iluminación de estado sólido(555)
- SOCKETS para ICS, transistores(953)
- Conectores conectables(1221)
- Conectores fotovoltaicos (panel solar)(136)
- Conectores de fibra óptica(370)
- FFC, conectores FPC (plano flexible)(761)
- Conectores D-Sub, en forma de D(2887)
- Conectores coaxiales (RF)(2389)
- Conectores circulares(14162)
- Conectores de alimentación de tipo cuchilla(273)
- Enchufes y receptáculos(2597)
- USB, DVI, conectores HDMI-adaptadores(572)
- Conectores USB, DVI, HDMI(4298)
- Bornes-conectores de cables a bordo(217)
- Terminales-conectores de empalme de alambre(4322)
- Terminales-conectores de clavija de alambre(328)
- Terminales-conectores de torreta(1273)
- Terminales-conectores especializados(2042)
- Terminales-conectores de pala(3902)
- Terminales-conectores de orejetas de soldadura(345)
- Terminales-conectores de tornillo(745)
- Terminales-conectores de anillo(12596)
- Terminales-conectores rectangulares(4747)
- Terminales: conectas rápidas, conectores de desconexión rápida(8514)
- Terminales-PC PIN, conectores de un solo poste(3776)
- Terminales: receptáculos de pin de PC, conectores de zócalo(5883)
- Terminales-conectores de cables magnéticos(1653)
- Terminales-conectores de cuchillas(112)
- Terminales-carcasas, botas(2850)
- Terminales-conectores de aluminio(108)
- Terminales-barril, conectores de bala(1107)
- Terminales-adaptadores(137)
- Regletas de bornes y placas de torreta(1159)
- Sistemas de Unión terminal(2533)
- Bloques de terminales-cable a bordo(43615)
- Bloques de terminales-especializados(3722)
- Bloques de terminales-distribución de energía(847)
- Bloques de terminales-panel de montaje(1359)
- Bloques de terminales-módulos de interfaz(1819)
- Bloques de terminales: encabezados, enchufes y enchufes (119920)
- Bloques de terminales-riel DIN, canal(9373)
- Bloques de terminales-contactos(65)
- Bloques de terminales-bloques de barrera(47517)
- Bloques de terminales-adaptadores(1059)
- Conectores de iluminación de estado sólido: contactos(271)
- Conectores de iluminación de estado sólido(1344)
- Zócalos para ICS, transistores-adaptadores(275)
- SOCKETS para ICS, transistores(22148)
- Shunts, puentes(907)
- Conectores rectangulares-muelles cargados(7721)
- Conectores rectangulares-carcasa(43023)
- Conectores rectangulares: encabezados, pin especializado(6129)
- Conectores rectangulares: encabezados, receptáculos, enchufes femeninos(229601)
- Conectores rectangulares-cabeceras, pernos macho(543338)
- Conectores rectangulares: colgación libre, montaje en panel(30142)
- Conectores rectangulares-contactos(10681)
- Conectores rectangulares: placa, cable directo a la placa(2432)
- Conectores rectangulares-adaptadores(475)
- Rectangular: conectores de placa a placa: encabezados, receptáculos, enchufes femeninos(9)
- Rectangular - Conectores de placa a placa - encabezados, alfileres masculinos(2)
- Conectores rectangulares: espaciadores de placa, apiladores (placa a placa)(238901)
- Conectores rectangulares: matrices, tipo de borde, entrepiso (tablero a tablero)(37853)
- Conectores de entrada de energía: entradas, puntos de venta, módulos(10310)
- Conectores conectables(6049)
- Conectores fotovoltaicos (panel solar): contactos(77)
- Conectores fotovoltaicos (panel solar)(504)
- Conectores modulares-bloques de cableado(99)
- Conectores modulares-tapones(1674)
- Conectores modulares-cajas de enchufe(181)
- Conectores modulares-jacks con magnetismo(10152)
- Conectores modulares-jacks(23416)
- Conectores modulares-adaptadores(855)
- Conectores de memoria-tarjetas PC-adaptadores(21)
- Conectores de memoria-PC Card Sockets(3299)
- Conectores de memoria-zócalos de módulo en línea(3390)
- Conectores LGH(764)
- Keystone-insertos(2758)
- Keystone-placas frontales, marcos(1926)
- Conectores resistentes-insertos, módulos(4190)
- Conectores resistentes-carcasas, campanas, bases(17226)
- Conectores de trabajo pesado-marcos(523)
- Conectores de trabajo pesado-contactos(1832)
- Conectores resistentes-ensamblajes(671)
- Conectores de fibra óptica-carcasa(919)
- Conectores de fibra óptica - Adaptadores(4455)
- Conectores de fibra óptica(3001)
- Conectores FFC, FPC (plano flexible) - carcasas(652)
- Conectores FFC, FPC (Flat flexible)-contactos(202)
- FFC, conectores FPC (plano flexible)(18691)
- D-sub, conectores en forma de d-terminadores(47)
- D-sub, conectores en forma de d-carcasa(12238)
- D-sub, conectores en forma de d-contactos(2714)
- D-sub, conectores en forma de d-conchas, campanas(5995)
- D-sub, conectores en forma de d-adaptadores(1304)
- Conectores d-sub(141346)
- Conectores en forma de d-Centronics(8770)
- Contactos, muelle cargado y presión(630)
- Contactos-multiusos(6196)
- Contactos-Leadframe(122)
- Conectores coaxiales (RF)-terminadores(1231)
- Conectores coaxiales (RF)-contactos(480)
- Conectores coaxiales (RF)-adaptadores(6386)
- Conectores coaxiales (RF)(25734)
- Conectores circulares-carcasa(441226)
- Conectores circulares-contactos(4737)
- Conectores circulares: frascos y abrazaderas de cable(53692)
- Conectores circulares-adaptadores(8839)
- Conectores circulares(1196254)
- Conectores de borde de tarjeta-carcasa(469)
- Conectores de borde de la tarjeta: conectores de borde(672683)
- Conectores de borde de tarjeta-contactos(325)
- Conectores de borde de tarjeta-adaptadores(73)
- Conectores de alimentación de tipo cuchilla: carcasas(837)
- Conectores de alimentación de tipo cuchilla: contactos(393)
- Conectores de alimentación de tipo cuchilla(4163)
- Entre adaptadores de serie(649)
- Conectores de alimentación de barril(935)
- Conectores de audio de barril(2432)
- Adaptadores de audio de barril(92)
- Conectores de banana y puntas-jacks, tapones(1644)
- Conectores de banana y puntas-postes de Unión(239)
- Conectores de plátano y puntas-adaptadores(75)
- Conectores de planeo-especializados(45586)
- Conectores planas-carcasa(6863)
- Conectores de planeo-métrico duro, estándar(6297)
- Conectores planas-DIN 41612(9408)
- Conectores de planeo-contactos(3583)
- Conectores de placa de ARINC-insertos(2357)
- Conectores planos-ARINC(3789)
Fabricante relevante







-
Resistencias
-
Condensadores
Condensadores
- Condensadores electrolíticos de aluminio(16817)
- Trimmers, condensadores variables(3151)
- Condensadores de película delgada(3473)
- Condensadores de tantalio(136103)
- Condensadores del tantalio-polímero(9778)
- Condensadores de silicio(320)
- Condensadores de óxido de niobio(330)
- Condensadores de la mica y de PTFE(9101)
- Condensadores de película(150406)
- Condensadores de doble capa eléctrica (EDLC), supercondensadores(2782)
- Condensadores cerámicos(833829)
- Redes de capacitores, matrices(2383)
- Condensadores electrolíticos de aluminio(125325)
- Condensadores de polímero de aluminio(7544)
Fabricante relevante






-
Transformadores
Transformadores
Fabricante relevante







-
Aisladores
-
Cristales, osciladores, resonadores
-
Interruptores
Interruptores
- Interruptores de enclavamiento(2893)
- Switches de parada de emergencia (E-Stop)(1160)
- Conmutadores de cable(571)
- Interruptores de conmutación(33608)
- Interruptores rueda(742)
- Interruptores táctiles(14263)
- Acción Snap, interruptores de límite(28077)
- Interruptores deslizantes(5166)
- Interruptores selector(9720)
- Interruptores rotativos(13850)
- Interruptores basculantes(53790)
- Interruptores de botones-efecto Hall(127)
- Interruptores pulsadores(190826)
- Interruptores de pantalla programables(39)
- Interruptores de navegación, joystick(1882)
- Interruptores magnéticos de Reed(1399)
- Interruptores del telclado numérico(637)
- Interruptores de bloqueo(3684)
- Interruptores DIP(7747)
- Componentes de conmutación configurable-lente(1435)
- Componentes de interruptor configurables: fuente de iluminación(1236)
- Componentes de interruptor configurables: bloque de contacto(1401)
- Componentes de conmutación configurable-cuerpo(16077)
- Componentes del interruptor de desconexión(2567)
Fabricante relevante






-
Relés
Relés
- Relevos de seguridad(1310)
- Reed Rees(1735)
- Relés de alta frecuencia (RF)(1190)
- Contactores (estado sólido)(686)
- Contactores (Electromecánicos)(11952)
- Relés automotrices(1881)
- Relés de estado sólido(10652)
- Relés de señal, hasta 2 amperios(9149)
- Zócalos del Relais(2075)
- Relés de potencia, más de 2 amperios(31604)
- Módulos de relé de E / S(712)
- Módulos de relé de e/s-entrada(2)
- Racks de módulo de relé de e/s(247)
Fabricante relevante






















Seleccione el idioma
Idioma actual
español
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Cómo elegir el microcontrolador adecuado para su proyecto
Tiempo: 15/05/2026
Navegar: 60
Elegir el microcontrolador adecuado no se trata sólo de elegir el chip más rápido o más popular.Debe considerar los requisitos de la aplicación, la memoria, el consumo de energía, las interfaces de comunicación, el rendimiento en tiempo real, las herramientas de desarrollo, el costo y la disponibilidad a largo plazo.Este artículo analizará qué es un microcontrolador, cómo funciona, sus características principales, aplicaciones comunes, pasos de selección y cómo se compara con los microprocesadores y las computadoras de placa única.
Catálogo
Cómo funciona un microcontrolador
Un microcontrolador funciona utilizando su procesador como centro de control principal.Dentro del procesador, la CPU lee y ejecuta instrucciones desde la memoria.La CPU incluye la unidad de control, que gestiona el flujo de operaciones, y la ruta de datos, que gestiona el movimiento de datos y los cálculos.
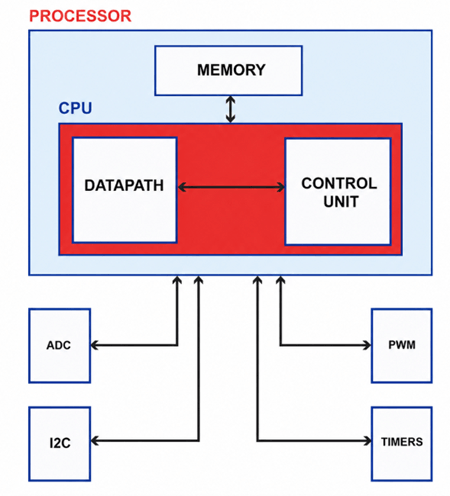
La memoria almacena las instrucciones del programa y los datos temporales necesarios mientras el microcontrolador está en ejecución.Cuando el sistema está encendido, la CPU recupera instrucciones de la memoria, las procesa y envía comandos a diferentes módulos internos.
El microcontrolador también se comunica con periféricos como ADC, I2C, PWM y temporizadores.El ADC convierte señales analógicas de sensores en datos digitales.I2C permite la comunicación con dispositivos externos.PWM controla salidas como la velocidad del motor o el brillo del LED, mientras que los temporizadores gestionan retrasos, conteos y operaciones basadas en el tiempo.
Principales características y especificaciones de los microcontroladores
|
Característica
/ Especificación |
Descripción |
común
Valores/ejemplos de MCU |
Importancia |
|
Arquitectura de CPU |
Interno
Diseño del procesador utilizado por la MCU. |
8 bits, 16 bits,
ARM Cortex-M0/M3/M4/M7 de 32 bits, RISC-V |
determina
Capacidad de procesamiento y complejidad del software. |
|
Velocidad del reloj |
Operando
frecuencia de la CPU |
1MHz a 600MHz |
reloj más alto
Las velocidades mejoran el rendimiento de ejecución. |
|
Memoria flash |
No volátil
memoria utilizada para el almacenamiento de programas |
4 KB a 16 MB |
Almacena firmware
y código de aplicación |
|
SRAM |
Temporal
memoria de trabajo para variables y operaciones en tiempo de ejecución |
512B a 2MB |
Afecta
capacidad de procesamiento de datos y multitarea |
|
EEPROM |
No volátil
memoria para guardar datos pequeños |
128B a 64KB |
Tiendas
valores y configuraciones de calibración |
|
Operando
voltaje |
Tensión de alimentación
rango requerido para la operación |
1,8 V a 5,5 V |
Importante para
sistemas alimentados por baterías |
|
Pines GPIO |
Propósito general
pines de entrada/salida digitales |
De 6 a 200+ pines |
Utilizado para
sensores, LED, relés, interruptores e interfaces |
|
Resolución del CAD |
Analógico a digital
precisión del convertidor |
8 bits, 10 bits,
12 bits, 16 bits |
superior
La resolución mejora la precisión de las mediciones analógicas. |
|
Resolución del CAD |
Digital a analógico
precisión del convertidor |
8 bits a 12 bits |
Utilizado para analógico
generación de señal |
|
Canales PWM |
Ancho de pulso
canales de salida de modulación |
2 a 24+
canales |
Controla motores,
LED y circuitos de potencia. |
|
Temporizadores/Contadores |
Sincronización de hardware
y módulos de conteo |
8 bits, 16 bits,
Temporizadores de 32 bits |
Utilizado para retrasos,
PWM, conteo de pulsos y programación |
|
Interfaces UART |
Serie
puertos de comunicación |
1 a 8 UART |
Utilizado para
depuración y comunicación del dispositivo |
|
Interfaces SPI |
Alta velocidad
puertos de comunicación síncronos |
1 a 6 SPI
módulos |
Utilizado para
Pantallas, sensores y chips de memoria. |
|
Interfaces I2C |
dos hilos
interfaces de comunicación |
1 a 4I2C
módulos |
Utilizado para
comunicación periférica de baja velocidad |
|
Soporte de bus CAN |
Automoción/industrial
soporte de comunicación |
Puede 2,0 puede FD |
Importante en
sistemas automotrices e industriales |
|
Soporte USB |
dispositivo USB o
funcionalidad del host |
USB 2.0
Velocidad completa/alta velocidad |
Permite PC y
conectividad periférica |
|
Soporte Ethernet |
Red cableada
conectividad |
10/100Mbps
Ethernet MAC |
Utilizado en IoT y
redes industriales |
|
inalámbrico
Conectividad |
Incorporado
comunicación inalámbrica |
wifi,
Bluetooth, Zigbee, LoRa |
Importante para
Aplicaciones de la IO |
|
poder
Consumo |
activo y dormido
uso actual |
µA corriente de sueño
a cientos de mA de corriente activa |
Crítico para
dispositivos portátiles |
|
Modos de sueño |
Bajo consumo
modos de funcionamiento
|
inactivo, en espera,
sueño profundo |
Extiende la batería
vida |
|
Sistema de interrupción |
Evento de hardware
capacidad de respuesta |
vector anidado
controlador de interrupciones (NVIC), interrupciones externas |
Permite rápido
respuesta en tiempo real |
|
Soporte DMA |
Memoria directa
Controlador de acceso |
1 a 16 DMA
canales |
Mejora
eficiencia de transferencia de datos de alta velocidad |
|
Tipo de paquete |
chip fisico
estilo de paquete |
INMERSIÓN, QFP, QFN,
BGA |
Afecta el tamaño de PCB
y método de montaje |
|
Operando
Temperatura |
Apoyado
rango de temperatura ambiental |
-40°C a +85°C,
+125°C |
Importante para
sistemas industriales y automotrices |
|
Seguridad
Características |
Ferretería
funciones de protección |
Arranque seguro,
cifrado, OTP, TrustZone |
Protege
firmware y datos |
|
Desarrollo
Ecosistema |
Software y
soporte de desarrollo de hardware |
ArduinoIDE,
STM32CubeIDE, MPLAB X, ESP-IDF |
Simplifica
programación y depuración |
|
Depuración
Soporte |
Incorporado
interfaces de depuración |
JTAG, SWD, ISP |
Ayuda al firmware
desarrollo y solución de problemas |
|
En tiempo real
Capacidad |
determinista
rendimiento de procesamiento |
soporte RTOS,
latencia de interrupción rápida |
Importante para
sistemas de control y automatización |
Aplicaciones comunes de los microcontroladores
Electrónica de Consumo
Los microcontroladores se utilizan ampliamente en productos electrónicos de consumo, como televisores inteligentes, lavadoras, hornos microondas, aires acondicionados, cámaras y dispositivos portátiles.En estos sistemas, la MCU gestiona las entradas del usuario, el monitoreo de sensores, las operaciones de sincronización, el control de pantalla y la comunicación entre módulos internos.Por ejemplo, en las lavadoras modernas, los microcontroladores ajustan automáticamente los niveles de agua, la velocidad del motor y los ciclos de lavado basándose en la retroalimentación de los sensores.En comparación con los sistemas de control más antiguos basados en relés, los diseños basados en MCU proporcionan mayor eficiencia, menor consumo de energía, tamaño de PCB más pequeño y funciones de automatización más inteligentes.
Automatización Industrial
Los sistemas de automatización industrial dependen en gran medida de microcontroladores para el monitoreo y control de máquinas en tiempo real.Las MCU se utilizan comúnmente en módulos PLC, variadores de motor, sensores de fábrica, robots industriales y equipos de control de procesos.Su rápida respuesta a interrupciones, precisión del temporizador y soporte de comunicación como CAN, Modbus y RS485 los hacen ideales para entornos industriales.En aplicaciones de control de motores, los microcontroladores generan señales PWM precisas para mejorar la regulación de la velocidad y la eficiencia energética.En comparación con los sistemas de control puramente analógicos, la automatización basada en MCU proporciona mayor flexibilidad, actualizaciones de firmware más sencillas y diagnósticos avanzados.
Sistemas automotrices
Los vehículos modernos contienen docenas de microcontroladores que administran funciones críticas como el control del motor, el frenado ABS, el despliegue de las bolsas de aire, los sistemas de iluminación, las pantallas del tablero y los sistemas de información y entretenimiento.Las MCU automotrices están diseñadas para brindar alta confiabilidad, procesamiento rápido y operación bajo temperaturas extremas.Muchos microcontroladores automotrices admiten bus CAN y estándares de seguridad funcional para una comunicación confiable del vehículo.En comparación con los métodos de control mecánico tradicionales, los sistemas automotrices basados en MCU mejoran la eficiencia del combustible, reducen las emisiones, mejoran la seguridad y permiten funciones avanzadas de asistencia al conductor.
IoT y dispositivos inteligentes
Los microcontroladores son la base de los dispositivos IoT y de los productos domésticos inteligentes, como enchufes inteligentes, sensores inalámbricos, cerraduras inteligentes, termostatos y sistemas de seguridad.Las MCU de IoT a menudo incluyen conectividad Wi-Fi, Bluetooth, Zigbee o LoRa integrada para comunicación en la nube y monitoreo remoto.Los microcontroladores IoT populares, como Espressif Systems ESP32, proporcionan un bajo consumo de energía y una red inalámbrica integrada, lo que los hace adecuados para aplicaciones alimentadas por baterías.En comparación con las computadoras de placa única, los microcontroladores ofrecen menores costos, menor uso de energía y tiempos de inicio más rápidos para tareas integradas dedicadas.
Robótica y Control de Motores
Los sistemas robóticos utilizan microcontroladores para procesar datos de sensores, controlar motores, gestionar algoritmos de movimiento y coordinar la comunicación entre subsistemas.Las MCU manejan tareas como la conducción de motores PWM, el procesamiento de retroalimentación del codificador, la detección de obstáculos y el posicionamiento de servos.En drones y brazos robóticos, los microcontroladores de 32 bits de alta velocidad mejoran la precisión del movimiento y la respuesta en tiempo real.En comparación con los controladores de motores analógicos, los sistemas basados en MCU permiten estrategias de control programables, movimiento adaptativo y capacidades de automatización avanzadas.
Dispositivos médicos
Los equipos médicos, como monitores de presión arterial, medidores de glucosa, oxímetros de pulso, sistemas de ECG portátiles y bombas de infusión, utilizan microcontroladores para el procesamiento de señales, la interfaz de sensores y la gestión de pantallas.Estos sistemas requieren un funcionamiento muy estable, un bajo consumo de energía y un control preciso de la sincronización.Muchas MCU médicas también incluyen monitoreo de seguridad y ADC de bajo ruido para una medición precisa de la señal analógica.En comparación con los sistemas lógicos discretos, los microcontroladores simplifican el diseño de dispositivos al tiempo que mejoran la portabilidad y las capacidades de diagnóstico.
Equipos de comunicación y redes.
Los enrutadores, módulos inalámbricos, conmutadores de red y puertas de enlace de comunicación suelen utilizar microcontroladores para el manejo de protocolos, el monitoreo de estado y la administración de periféricos.Las MCU gestionan estándares de comunicación en serie como UART, SPI, I2C, USB y Ethernet.En las puertas de enlace de comunicaciones industriales, los microcontroladores ayudan a convertir señales entre diferentes protocolos manteniendo una transferencia de datos confiable.Su capacidad para manejar múltiples interfaces de comunicación los hace esenciales en los sistemas de redes modernos.
Gestión Energética y Electrónica de Potencia
Las fuentes de alimentación, los inversores solares, los sistemas de gestión de baterías (BMS), los sistemas UPS y los medidores de energía inteligentes utilizan microcontroladores para monitorear el voltaje, la corriente, la temperatura y la eficiencia energética.En las fuentes de alimentación conmutadas, las MCU regulan la conmutación PWM para mantener un voltaje de salida estable y mejorar la eficiencia.Los sistemas de energía digitales avanzados pueden ajustar dinámicamente los parámetros operativos según las condiciones de carga.En comparación con los circuitos de control exclusivamente analógicos, la administración de energía basada en MCU proporciona una mejor optimización de la eficiencia, protección contra fallas y comportamiento programable del sistema.
Varios pasos para elegir un microcontrolador (MCU)
Paso 1. Definir los requisitos de la solicitud
El primer paso para elegir un microcontrolador es comprender los requisitos exactos del proyecto.Determine si el sistema manejará la detección, el control de motores, la comunicación inalámbrica, la gestión de pantallas, el procesamiento de señales o la automatización en tiempo real.Es posible que aplicaciones como los electrodomésticos simples solo requieran funciones de control básicas, mientras que la robótica, los sistemas industriales o los dispositivos IoT a menudo requieren un procesamiento más rápido y periféricos avanzados.Definir claramente la aplicación evita seleccionar una MCU que tenga poca potencia o sea innecesariamente costosa.
Paso 2. Haga una lista completa de interfaces de hardware
Cree una lista de todos los periféricos e interfaces necesarios en el sistema.Esto incluye pines GPIO, UART, SPI, I2C, ADC, DAC, salidas PWM, temporizadores, bus CAN, USB, Ethernet, Wi-Fi o Bluetooth.Por ejemplo, los sistemas de control de motores pueden requerir múltiples canales PWM y temporizadores de alta resolución, mientras que los sistemas basados en sensores pueden priorizar el rendimiento del ADC.Elegir una MCU sin suficientes interfaces puede forzar rediseños de hardware más adelante en el desarrollo.
Paso 3. Estimar el rendimiento de procesamiento requerido
Diferentes aplicaciones requieren diferentes capacidades de procesamiento.Los sistemas simples de control LED o basados en botones pueden utilizar microcontroladores de 8 bits de bajo costo, mientras que el procesamiento de datos en tiempo real, el aprendizaje automático o los sistemas de comunicación avanzados pueden requerir MCU ARM Cortex o RISC-V de 32 bits.También se deben considerar la velocidad del reloj, la latencia de interrupción, la compatibilidad con DMA y la capacidad de punto flotante.Las MCU de mayor rendimiento mejoran la multitarea y la velocidad de respuesta, pero generalmente aumentan el consumo de energía y el costo del sistema.
Paso 4. Elija la arquitectura MCU adecuada
Los microcontroladores suelen estar disponibles en arquitecturas de 8, 16 y 32 bits.Una MCU de 8 bits suele ser adecuada para tareas de control integradas sencillas y productos de bajo coste.Una MCU de 16 bits ofrece una capacidad computacional mejorada para sistemas de control moderados.Una MCU de 32 bits proporciona mejor rendimiento, mayor soporte de memoria, periféricos avanzados y escalabilidad de software mejorada.Los sistemas industriales y de IoT modernos utilizan con frecuencia arquitecturas de 32 bits debido a su flexibilidad y soporte de desarrollo a largo plazo.
Paso 5. Determinar los requisitos de memoria flash, RAM y almacenamiento
La MCU debe tener suficiente memoria para admitir el firmware de la aplicación y el funcionamiento en tiempo de ejecución.La memoria flash almacena el código del programa, mientras que la RAM maneja variables temporales, búferes y operaciones de pila.Las aplicaciones con pantallas gráficas, comunicación inalámbrica o compatibilidad con RTOS generalmente requieren mucha más memoria.Seleccionar memoria insuficiente puede causar inestabilidad del software, funcionalidad limitada o limitaciones de futuras actualizaciones.
Paso 6. Evaluar los requisitos de consumo de energía
Los dispositivos que funcionan con baterías requieren microcontroladores de bajo consumo con modos de suspensión eficientes y baja corriente de espera.Los productos portátiles, como sensores inteligentes, dispositivos portátiles y dispositivos IoT, a menudo priorizan la eficiencia energética sobre la velocidad máxima de procesamiento.Las MCU modernas de bajo consumo pueden funcionar en modo de suspensión profunda utilizando solo microamperios de corriente y al mismo tiempo admiten tiempos de despertar rápidos.La gestión adecuada de la energía afecta directamente la duración de la batería y el rendimiento térmico.
Paso 7. Verifique las funciones de sincronización y rendimiento en tiempo real
Aplicaciones como la robótica, la automatización industrial, los motores y los sistemas de comunicación a menudo requieren un rendimiento determinista en tiempo real.Los temporizadores, la velocidad de respuesta a las interrupciones, la precisión de PWM, los temporizadores de vigilancia y los controladores DMA son características importantes de estos sistemas.La capacidad en tiempo real ayuda a mantener un funcionamiento estable y un control preciso incluso durante condiciones de procesamiento de alta velocidad.
Paso 8. Verificar el soporte de comunicación y conectividad
Los sistemas integrados modernos frecuentemente requieren comunicación con sensores, computadoras, plataformas en la nube u otros dispositivos.Asegúrese de que la MCU admita los protocolos necesarios, como UART, SPI, I2C, USB, CAN, Ethernet, Wi-Fi, Bluetooth, Zigbee o LoRa.Para los productos de IoT, la conectividad inalámbrica integrada puede reducir la complejidad de la PCB, el tiempo de desarrollo y el costo total del sistema.
Paso 9. Considere el entorno operativo y la confiabilidad
Las condiciones ambientales afectan fuertemente la selección de MCU.Los sistemas industriales y automotrices pueden requerir rangos de temperatura de funcionamiento ampliados, resistencia EMI, tolerancia a la vibración y funcionamiento de alta confiabilidad.Los microcontroladores de grado automotriz a menudo admiten estándares de seguridad y funciones de detección de fallas para aplicaciones críticas.Ignorar los requisitos ambientales puede reducir la confiabilidad del sistema a largo plazo.
Paso 10. Compare las familias y los fabricantes de MCU disponibles
Después de definir los requisitos técnicos, compare familias de microcontroladores de fabricantes como STMicroelectronics, Microchip Technology, Texas Instruments, NXP Semiconductors y Espressif Systems.Evalúe el rendimiento del procesamiento, la integración de periféricos, el ecosistema de software, los precios, la calidad de la documentación y la disponibilidad a largo plazo antes de tomar una decisión final.
Paso 11. Verifique el tipo de paquete y las restricciones de diseño de PCB
El paquete MCU afecta el diseño de la PCB, la complejidad del ensamblaje, el rendimiento térmico y el costo de fabricación.Los paquetes DIP son más fáciles para la creación de prototipos, mientras que los paquetes QFN y BGA proporcionan espacios más pequeños para productos compactos.Los diseñadores también deben considerar el espaciado de pines, la dificultad de soldadura y la disipación térmica al seleccionar un tipo de paquete.
Paso 12. Verifique el costo, la disponibilidad y la longevidad del producto
Los precios de MCU deben coincidir con el presupuesto del producto y al mismo tiempo mantener la estabilidad del suministro a largo plazo.Durante la escasez mundial de semiconductores, algunos microcontroladores se volvieron difíciles de conseguir, lo que provocó importantes retrasos en la producción.La elección de familias de MCU ampliamente disponibles con un sólido respaldo del fabricante reduce los riesgos de adquisiciones futuras y simplifica la producción en masa.
Paso 13. Evaluar las herramientas de desarrollo y el ecosistema de software
Un ecosistema de software sólido simplifica el desarrollo y la resolución de problemas.Evalúe la disponibilidad de IDE, SDK, bibliotecas de middleware, soporte RTOS, herramientas de depuración y recursos comunitarios.Las plataformas de desarrollo como STM32CubeIDE, MPLAB X, Arduino IDE y ESP-IDF pueden reducir significativamente el tiempo de desarrollo del firmware y mejorar la eficiencia de la depuración.
Paso 14. Elija una placa de desarrollo y comience a crear prototipos
Los kits de desarrollo permiten a los ingenieros probar periféricos, interfaces de comunicación, consumo de energía y compatibilidad de software antes de la producción final del hardware.La creación de prototipos ayuda a identificar limitaciones de hardware, errores de firmware y problemas térmicos en las primeras etapas del desarrollo.También reduce los riesgos de diseño y acelera la validación del producto.
Paso 15. Realizar pruebas y validación final
Antes de finalizar la selección de MCU, realice pruebas en condiciones de funcionamiento reales.Verifique la estabilidad del sistema, la confiabilidad de la comunicación, el comportamiento térmico, el consumo de energía y el rendimiento de los periféricos.La validación en el mundo real ayuda a garantizar que el microcontrolador pueda manejar el funcionamiento a largo plazo y la futura expansión del firmware sin problemas de confiabilidad.
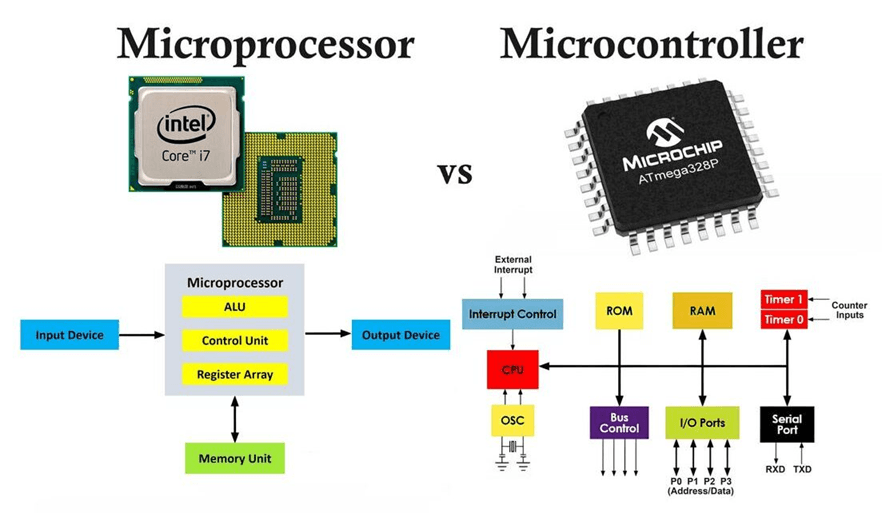
Microcontroladores vs Microprocesadores
|
Parámetro |
Microcontroladores
(MCU) |
Microprocesadores
(MPU) |
|
Propósito principal |
Dedicado
tareas de control |
Propósito general
informática |
|
Integración |
CPU, memoria,
E/S, temporizadores, ADC, PWM y periféricos en un solo chip |
Generalmente necesita
RAM externa, almacenamiento, E/S y chips de soporte |
|
Poder de procesamiento |
Bajo a moderado |
Alto |
|
poder
consumo |
Generalmente bajo |
Generalmente más alto |
|
Costo |
Bajar para
control integrado |
sistema superior
costo |
|
Sistema operativo |
metal desnudo
firmware o RTOS |
Generalmente corre
Sistema operativo completo como Linux, Android o Windows |
|
Tiempo de arranque |
Rápido, a menudo
milisegundos |
Más lento debido al sistema operativo
cargando |
|
Lo mejor para |
Sensores, motores,
electrodomésticos, nodos IoT, sistemas de control |
computadoras,
Smartphones, tablets, sistemas HMI avanzados |
|
en tiempo real
controlar |
Muy bueno para
control determinista |
menos predecible
a menos que utilices un sistema operativo en tiempo real |
|
Ejemplo |
STM32, foto, AVR,
ESP32 |
ARM Cortex-A,
Intel, AMD, NXP i.MX |
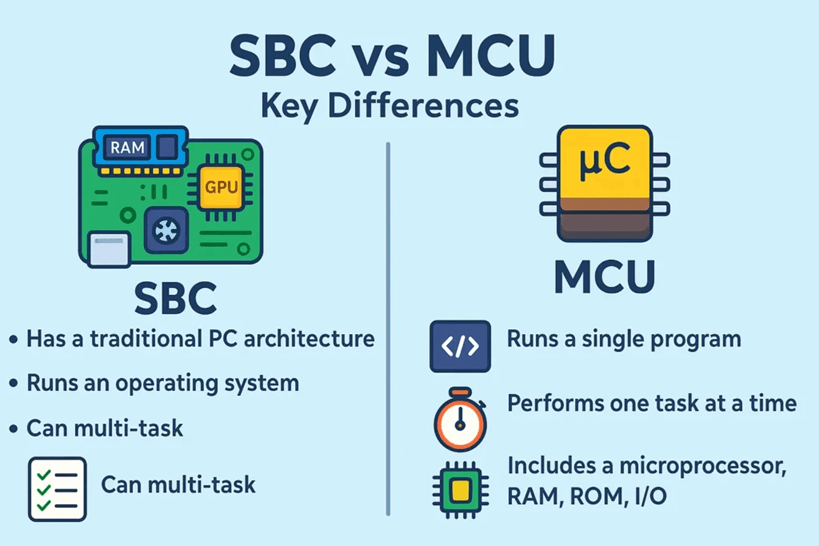
Microcontroladores frente a computadoras de placa única (SBC)
|
Parámetro |
Microcontroladores
(MCU) |
soltero
Computadoras de abordo (SBC) |
|
Propósito principal |
hardware directo
controlar |
Computación completa
en una pequeña tabla |
|
Diseño de hardware |
Se utiliza un solo chip
en una PCB personalizada |
tablero completo
con CPU, RAM, almacenamiento, puertos y circuitos de alimentación |
|
Sistema operativo |
metal desnudo
firmware o RTOS |
Generalmente
SO basado en Linux |
|
poder
consumo |
Muy bajo, bueno
para dispositivos de batería |
Más alto, generalmente
necesita fuente de alimentación estable |
|
Control GPIO |
Rápido y
en tiempo real |
Disponible, pero
menos tiempo real debido a retrasos en el sistema operativo |
|
Poder de procesamiento |
inferior |
Mucho más alto |
|
Conectividad |
Depende de la MCU
caracteristicas |
A menudo incluye
USB, HDMI, Ethernet, Wi-Fi, Bluetooth |
|
Tiempo de arranque |
muy rapido |
Más lento porque
El sistema operativo debe cargarse |
|
Costo |
Bajar para masa
producción |
Más alto por tablero |
|
Lo mejor para |
Incrustado
control, sensores, control de motores, IoT de baja potencia |
sistemas de visión,
servidores web, proyectos de inteligencia artificial, medios, interfaces avanzadas |
|
Ejemplo |
Arduino, STM32,
ESP32, foto |
frambuesa pi,
BeagleBone, Orange Pi, NVIDIA Jetson |
Conclusión
A la hora de elegir una MCU, la mejor opción depende de las necesidades reales del proyecto.Es posible que un dispositivo simple solo necesite una MCU de 8 bits de bajo costo, mientras que un sistema IoT, robótico, industrial o automotriz puede requerir una MCU de 32 bits más rápida con más memoria y periféricos avanzados.Al verificar el rendimiento, el uso de energía, las interfaces, el soporte de software, el tipo de paquete, la disponibilidad y los resultados de las pruebas, puede elegir un microcontrolador que sea confiable, escalable y adecuado para un uso a largo plazo.
Preguntas frecuentes [FAQ]
1. ¿Por qué se utilizan microcontroladores en lugar de computadoras completas?
Los microcontroladores son más pequeños, más baratos y consumen menos energía.Son mejores para tareas de control dedicadas como leer sensores, accionar motores y administrar sistemas electrónicos simples.
2. ¿Cómo controla un microcontrolador el hardware externo?
Lee señales de entrada, las procesa a través de la CPU y envía comandos de salida a través de interfaces GPIO, PWM, ADC, UART, SPI o I2C.
3. ¿Por qué es importante el tamaño de la memoria en una MCU?
Flash almacena el programa, mientras que la RAM maneja datos temporales.Si la memoria es demasiado pequeña, el sistema puede volverse inestable o limitar futuras actualizaciones.
4. ¿Cuál es la ventaja de una MCU de 32 bits sobre una MCU de 8 bits?
Una MCU de 32 bits es más rápida, admite más memoria y maneja mejor tareas complejas.Una MCU de 8 bits es más barata y suficiente para aplicaciones de control sencillas.
5. ¿Por qué son importantes los temporizadores y el PWM en los microcontroladores?
Los temporizadores gestionan los retrasos y el conteo, mientras que PWM controla la velocidad del motor, el brillo del LED y la potencia de salida.Son importantes para un control preciso.
6. ¿Cómo ayudan las MCU a ahorrar energía de la batería?
Muchas MCU tienen modos de suspensión y suspensión profunda que reducen el uso actual cuando el dispositivo está inactivo.Esto ayuda a prolongar la vida útil de la batería.
7. ¿Por qué son importantes UART, SPI e I2C?
Estas interfaces permiten que la MCU se comunique con sensores, pantallas, chips de memoria, módulos inalámbricos y otros dispositivos.
8. ¿Cuándo deberías elegir una MCU en lugar de un SBC?
Elija una MCU para tareas de control en tiempo real y de bajo consumo.Elija un SBC para informática avanzada, gráficos, inteligencia artificial, servidores web o aplicaciones basadas en Linux.
9. ¿Por qué es importante el ecosistema de software MCU?
Buenas herramientas, bibliotecas, SDK y soporte comunitario hacen que el desarrollo sea más rápido y sencillo.También ayudan a reducir los problemas de depuración y los problemas de mantenimiento a largo plazo.
Artículo relacionado
-
![Tarjetas de interfaz de red Ethernet, Wi-Fi, PCIe y clasificaciones de velocidad]() May 15 2026Tarjetas de interfaz de red Ethernet, Wi-Fi, PCIe y clasificaciones de velocidad
May 15 2026Tarjetas de interfaz de red Ethernet, Wi-Fi, PCIe y clasificaciones de velocidadUna tarjeta de interfaz de red (NIC) es una de las partes más importantes de cualquier dispositivo que se conecte a una red.Funciona silenciosamente ... -
![Cómo funciona el DRV8871 para el control de motores de CC con escobillas]() May 14 2026Cómo funciona el DRV8871 para el control de motores de CC con escobillas
May 14 2026Cómo funciona el DRV8871 para el control de motores de CC con escobillasEl DRV8871 es un controlador de motor para controlar un motor de CC con escobillas en proyectos electrónicos pequeños y medianos.Es útil cuando nec...


Productos relacionados con

CGJ4J2X7R0J155K125AA
CAP CER 1.5UF 6.3V X7R 0805

C3225X7R2A474M200AA
CAP CER 0.47UF 100V X7R 1210

GRM0335C1H6R7DA01D
CAP CER 6.7PF 50V C0G/NP0 0201
ADS5553IPFPR
IC ADC 14BIT PIPELINED 80HTQFP

MAX3237ECDWR
IC TRANSCEIVER FULL 5/3 28SOIC

ADG441BR
IC SWITCH SPST-NCX4 70OHM 16SOIC

HM1188FNL
PULSE XFMR 1CT:1CT TX 1CT:1CT RX

S9S12GN48F0MLHR
IC MCU 16BIT 48KB FLASH 64LQFP

RH-IXA042SJZZ
QFP SHARP

T491A156K016ZT
CAP TANT 15UF 10% 16V 1206

HD64F3687FZV
HD64F3687FZV RENESAS

SST79RC07-4C-NH
SST79RC07-4C-NH SST

Z8018015VSC
Z8018015VSC ZILOG